Digitale bildgebende Verfahren: Transformationen


Vorwort | Grundlagen | Beleuchtung | Bildaufnahme | Lichtwandlung | Digitale Bilder | Wiedergabe | Transformationen | Literatur
Dieses Kapitel beschäftigt sich mit mathematischen Transformationen bei optischen Abbildungen und deren Digitalisaten.
Helligkeitstransformationen
BearbeitenDie Leuchtdichten, die in einem Bild die Helligkeiten repräsentieren, werden bei der Digitalisierung in Zahlenwerte umgerechnet, mit denen beliebige mathematische Operationen zur Bildbeeinflussung und zur Bildverbesserung durchgeführt werden können.
Gammakorrektur
BearbeitenUm die mittleren Helligkeiten eines digitalen Bildes anzupassen, ohne die minimale Helligkeit (schwarz) und die maximale Helligkeit (weiß) zu ändern, kann eine rechnerische Gammakorrektur durchgeführt werden, um eine Eingangshelligkeit in eine Ausgangshelligkeit umzuwandeln. Der Name dieser Korrektur rührt vom Exponenten der Übertragungsfunktion her:




mit
![{\displaystyle A,E\in \mathbb {R} \mid [0,1]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/a18e678f5ce136f87c2f215895e0c770a4a6ccf0)
und

Die Werte für die Eingangshelligkeiten ergeben sich aus den digitalen Zahlenwerten für die Helligkeit folgendermaßen:


Der reellwertige Exponent ist hierbei immer positiv. Die Null und die Eins - also der dunkelste und der hellste Helligkeitswert - bleiben nach der Transformation erhalten, die dazwischenliegenden Werte werden entweder alle vergrößert ( ) oder alle verkleinert ( ). Bei behalten alle Helligkeiten ihren Wert (identische Abbildung).



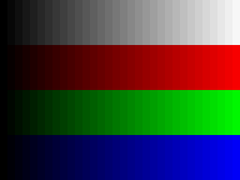
- Helligkeits- und Farbbalken mit verschiedenen Gammakorrekturen
-
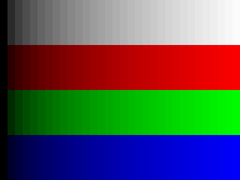 Gammakorrektur mit ,
Gammakorrektur mit ,
Mitteltöne werden heller dargestellt -
 Originalbild mit
Originalbild mit -
 Gammakorrektur mit ,
Gammakorrektur mit ,
Mitteltöne werden dunkler dargestellt






Die Gammakorrektur kann daher eingesetzt werden, wenn in einem Bild zwar alle Tonwerte vorhanden sind, jedoch die mittleren Tonwerte zu hell oder wie in folgendem Beispiel zu dunkel wirken:
- Aufnahme eines Springbrunnens im Gegenlicht
-
 Ausschnitt einer Aufnahme im Gegenlicht. Die Tonwerte verteilen sich zwar über alle Helligkeiten, haben aber ihren Schwerpunkt bei geringen Helligkeiten, so dass das Bild sehr dunkel wirkt, obwohl es nicht unterbelichtet ist.
Ausschnitt einer Aufnahme im Gegenlicht. Die Tonwerte verteilen sich zwar über alle Helligkeiten, haben aber ihren Schwerpunkt bei geringen Helligkeiten, so dass das Bild sehr dunkel wirkt, obwohl es nicht unterbelichtet ist. -
 Die Tonwerte wurden mit der Gammakorrektur (Parameter ) korrigiert. Die hellsten und dunkelsten Bildpunkte bleiben unverändert, die häufigste Helligkeit hat aber einen deutlich höheren Wert, so dass die Details in den dunklen Bereichen besser hervortreten.
Die Tonwerte wurden mit der Gammakorrektur (Parameter ) korrigiert. Die hellsten und dunkelsten Bildpunkte bleiben unverändert, die häufigste Helligkeit hat aber einen deutlich höheren Wert, so dass die Details in den dunklen Bereichen besser hervortreten.


- Histogramme eines Springbrunnens im Gegenlicht
-
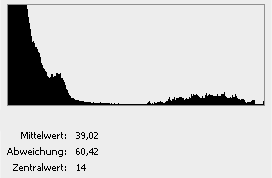 Histogramm der unkorrigierten dunklen Aufnahme mit
Histogramm der unkorrigierten dunklen Aufnahme mit -
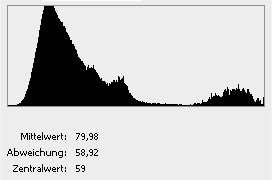 Histogramm nach der Gammakorrektur mit
Histogramm nach der Gammakorrektur mit


Die Gammakorrektur kann bei Bedarf auch für alle Farbkanäle unabhängig eingestellt werden, wie zum Beispiel bei den drei Primärfarben rot, grün und blau:



Tonwertkorrektur
BearbeitenWeißpunkt
BearbeitenWenn der Spielraum der ebenfalls Tonwerte genannten Helligkeitswerte in einem digitalen Bild nicht ausgenutzt wird - bei unterbelichteten Bildern ist dies üblicherweise der Fall, da die höheren Helligkeitswerte nicht auftauchen -, ist es sinnvoll, die Helligkeitswerte gleichmäßig zu erhöhen, damit bei der Wiedergabe ein klares Bild mit der Möglichkeit von schwarzen und weißen Bildpunkten entsteht. Die Ausgangswerte ergeben sich dann auf einfache Weise aus den Eingangswerten durch eine lineare Transformation:

mit
- ,

wobei die maximale im Eingangsbild auftretende Helligkeit ist. Im Ausgangsbild ist nach der Transformation die maximal auftretende Helligkeit gleich 1. Entsprechende Punkte werden auch als die Weißpunkte des Bildes bezeichnet.

- Unterbelichtete Aufnahme einer Kuppel
-
 Ausschnitt einer unterbelichteten Aufnahme im Gegenlicht, bei der die helle Bildpartie (das Fenster unterhalb des Ausschnittes) weggeschnitten wurde. Die Tonwerte verteilen sich ausschließlich über niedrige Werte.
Ausschnitt einer unterbelichteten Aufnahme im Gegenlicht, bei der die helle Bildpartie (das Fenster unterhalb des Ausschnittes) weggeschnitten wurde. Die Tonwerte verteilen sich ausschließlich über niedrige Werte. -
 Die Tonwerte wurden korrigiert, indem alle Tonwerte ungefähr verdoppelt wurden.
Die Tonwerte wurden korrigiert, indem alle Tonwerte ungefähr verdoppelt wurden.


- Histogramme der unterbelichteten Aufnahme einer Kuppel
-
 Histogramm der unterbelichteten Aufnahme
Histogramm der unterbelichteten Aufnahme -
 Histogramm der korrigierten Aufnahme
Histogramm der korrigierten Aufnahme


Weißabgleich
BearbeitenEine Tonwertkorrektur kann auch separat für alle vorhandenen Farbkanäle, meist die Primärfarben rot, grün und blau, durchgeführt werden. Um einen Bildbereich farbneutral, also ohne Farbstich, zu bekommen, müssen die entsprechenden Tonwerte der Farbkanäle auf die gleichen Helligkeiten gerechnet werden - diesen Vorgang bezeichnet man als Weißabgleich. Bei Aufnahmesystemen mit automatischem Weißabgleich wird oft in jedem Farbkanal der hellste Punkt gesucht, und mit deren Tonwerten werden die Korrekturen für die einzelnen Farbkanäle ausgerechnet. Bei den üblicherweise verwendeten Primärfarben ergibt sich dann:

mit

wobei , und die maximalen im Eingangsbild auftretenden Helligkeiten der drei Farbkanäle sind. Im Ausgangsbild ist nach der Transformation die maximal auftretende Helligkeit für alle Farbkanäle gleich 1. Punkte mit diesen Tonwerten werden auch hier als Weißpunkte bezeichnet.



Problematisch ist der automatische Weißabgleich, wenn es im Eingangsbild gar keine Punkte gibt, die dem Weißpunkt entsprechen. Solche Umstände liegen vor, wenn das aufgenommene Objekt keine weißen Punkte enthält oder monochromatische Punkte die hellsten im Bild sind. Eine typische Situation sind Sonnenauf- und -untergänge, bei der das helle Sonnenlicht eine deutliche Rotfärbung der Szenerie verursacht. Hier ist es in der Regel vorzuziehen, die Farbkanäle nicht für den hellsten Punkt, sondern für einen farbneutralen Punkt (Graupunkt) anzugleichen.
- Mit einer Digitalkamera aufgenommene Schneelandschaft
-
 Mit automatischem Weißabgleich: der Schnee im Schatten erscheint blau, der Schnee im Hintergrund im Licht der Morgensonne erscheint weiß.
Mit automatischem Weißabgleich: der Schnee im Schatten erscheint blau, der Schnee im Hintergrund im Licht der Morgensonne erscheint weiß. -
 Mit korrigiertem Weißabgleich: der Schnee im Schatten ist farbneutral (hellgrau), der Schnee im Hintergrund im Licht der Morgensonne ist rötlich und gelblich.
Mit korrigiertem Weißabgleich: der Schnee im Schatten ist farbneutral (hellgrau), der Schnee im Hintergrund im Licht der Morgensonne ist rötlich und gelblich.


- Histogramme der mit einer Digitalkamera aufgenommenen Schneelandschaft
-
 Histogramm der Aufnahme mit automatischem Weißabgleich. Blau ist die dominante Farbe.
Histogramm der Aufnahme mit automatischem Weißabgleich. Blau ist die dominante Farbe. -
 Histogramm der Aufnahme mit korrigiertem Weißabgleich. Die Verteilungen der Farben blau und rot wurden durch eine Tonwertkorrektur der Verteilung der Farbe grün angeglichen, so dass alle entsprechenden Bildpunkte farbneutral dargestellt werden.
Histogramm der Aufnahme mit korrigiertem Weißabgleich. Die Verteilungen der Farben blau und rot wurden durch eine Tonwertkorrektur der Verteilung der Farbe grün angeglichen, so dass alle entsprechenden Bildpunkte farbneutral dargestellt werden.


Koordinatentransformationen
BearbeitenBildkoordinaten
Bearbeiten



Werden die Bildkoordinaten und eines Bildpunktes von der Bildmitte aus bestimmt, die in der Regel senkrecht von der optischen Achse durchlaufen wird, ergibt sich der entsprechende Ortsvektor zu:


Die Bildhöhe dieses Bildpunktes von der optischen Achse aus gemessen beträgt dann:

Der Winkel zwischen optischer Achse und dem Strahl durch den Bildpunkt im Hauptpunkt ist üblicherweise nicht unmittelbar bekannt, kann aber leicht aus der Bildweite und der Bildhöhe bestimmt werden:

In der Informationstechnik (IT) wird aus historischen Gründen der Ursprung des Bildkoordinatensystems häufig in die linke obere Bildecke gelegt, wobei die x-Achse nach rechts und die y-Achse nach unten verlaufen. Wenn die Bildbreite und die Bildhöhe betragen, ergibt sich die folgende Transformation zu den oben angegebenen Bildkoordinaten:



Himmelskoordinaten
Bearbeiten
Der Zenit ist senkrecht über dem Beobachter und der Nadir senkrecht unter dem Beobachter im Zentrum der Darstellung (dunkelgraue Kreisscheibe).
Der Meridian ist der Großkreis durch Himmelsnord- und Himmelsüdpol sowie die Richtungen Norden (N) und Süden (S) vom Beobachter aus gesehen.
Der Beobachter sieht im Horizontalsystem (hellgraue Scheibe) am Himmel einen Punkt (violett) unter dem Azimut (schwarz), der vom nördlichen Meridian aus im Uhrzeigersinn in der Horizontalebene gemessen wird, und unter dem Höhenwinkel (grün), der auf dem Großkreis zwischen Nadir und Zenit (grün), der durch den beobachteten Punkt (violett) geht, und der senkrecht zur Horizontalebene und von der Horizontalebene aus gemessen wird.

Diese Winkel können in die kartesischen Koordinaten , und im Horizontalsystem umgerechnet werden:




Diese Koordinaten des entsprechenden Ortsvektors vom Mittelpunkt in Richtung des beobachteten Punktes sind normalisiert:


Im Äquatorialsystem (türkisfarbene Scheibe) wird der Stundenwinkel (cyan) vom nördlichen Meridian aus im Uhrzeigersinn in der Äquatorialebene gemessen, und der Deklinationswinkel (rot) wird auf dem Großkreis zwischen Himmelssüdpol und Himmelsnordpol (rot), der durch den beobachteten Punkt (violett) geht, senkrecht zur Äquatorialebene und von der Äquatorialebene aus gemessen.


Ostpunkt (O) und Westpunkt (W) sind in beiden Systemen identisch, und die Neigung der beiden Ebenen zueinander ist durch die Polhöhe (blau) gegeben, die mit dem Breitengrad übereinstimmt, auf dem sich der Beobachter befindet.

Für die Umrechnung von Azimut und Höhenwinkel im Horizontalsystem in den Stundenwinkel und die Rektaszension im Äquatorialsystem gelten die folgenden Beziehungen:

und

Falls der Deklinationswinkel , die Sternzeit und die Rektaszension eines Himmelsobjekts im Äquatorialsystem zum Beispiel mit Hilfe von Ephemeriden-Tabellen bekannt sind, können der der dazugehörige Stundenwinkel und schließlich der entsprechende Azimut und Höhenwinkel im Horizontalsystem mit den folgenden Gleichungen berechnet werden:




und

Scheinbare Bewegung
BearbeitenDer beobachtete Himmelspunkt (violett) bewegt sich in der nördlichen Hemisphäre innerhalb eines halben Tages in Pfeilrichtung auf einem Halbkreis (mit respektive ) von Osten nach Westen, der mit konstantem Deklinationswinkel (rot) parallel zur Äquatorialebene (türkisfarbene Scheibe) liegt. Innerhalb eines ganzen siderischen Tages wird ein vollständiger Kreis durchlaufen.



Innerhalb einer vorgegebenen Zeitspanne in Sekunden verändert sich der Stundenwinkel demnach im Bogenmaß um den Betrag:


Der neue Stundenwinkel beträgt dann also:


Mithilfe des neuen Strundenwikels kann dann auch die neue Position des betrachteten Punktes im Horizontalsystem bestimmt werden:

und

Die scheinbare Bewegung des betrachteten Himmelspunktes kann durch die Differenz der Azimute

und die Differenz der Höhenwinkel

ausgedrückt werden.
Beispiel
BearbeitenDas folgende Beispiel für den Blutmond am 28. September 2015 ist für den 52. Breitengrad südlich von Berlin und eine Zeitdifferenz (= Belichtungszeit) von sechs Sekunden berechnet:
| Winkel | Winkel in Grad | Winkel im Bogenmaß (Radiant) |
|---|---|---|
| Polhöhe | 52,000 | 0,90757 |
| Azimut | 56,000 | 0,97738 |
| Höhenwinkel | 29,000 | 0,50615 |
| Deklination | 4,64184 | 0,08102 |
| Stundenwinkel | 46,6754 | 0,81464 |
| Stundenwinkeldifferenz | 0,0251 | 0,00044 |
| Neuer Stundenwinkel | 46,7005 | 0,81508 |
| Neuer Azimut | 56,0245 | 0,97781 |
| Neuer Höhenwinkel | 28,9872 | 0,50592 |
| Azimutdifferenz | 0,02454 | 0,00043 |
| Höhenwinkedifferenz | -0,01280 | -0,00022 |





Projektion
Bearbeiten
Im Folgenden wird die Bewegung eines Himmelspunktes von P mit dem Azimut und dem Höhenwinkel nach P' mit dem Azimut und dem Höhenwinkel betrachtet, der von einem Mittelpunkt M aus in der unbewegten Projektionsebene mit x- und y-Koordinate als Verschiebung von Bildpunkt Q nach Bildpunkt Q' erscheint.
Bei einer Bildweite, die bei einer Abbildung aus dem Unendlichen mit der Brennweite identisch ist, ergeben sich in der Bildebene, deren horizontale x-Achse parallel zum Horizont ausgerichtet ist und deren Normale (= optische Achse der Abbildung durch den Bildpunkt Q zum Punkt P) auf den betrachteten Punkt P zeigt, die folgenden Koordinatendifferenzen aus den Winkeldifferenzen im Bogenmaß:



Beispiele
BearbeitenBei Beobachtung am Äquator ( ) vereinfacht sich die Betrachtung folgendermaßen:



Umgekehrt verhält es sich bei der Beobachtung am Nord- oder Südpol ( ):



Die folgenden Werte sind für eine Brennweite von 140 Millimetern und für die Winkel im oben angegebenen Beispiel berechnet ( ). Die Breite und Höhe eines Bildpunkts entsprechen bei den folgenden Beispielbildern einer Länge von 7,4 Mikrometern in der Bildebene. Der Bildausschnitt auf dem Bildsensor betrug rund 7,6 mal 5,7 Quadratmillimeter.

| Verschiebung | Wert |
|---|---|
| Horizontale Verschiebung in mm | 0,060 |
| Vertikale Verschiebung in mm | -0,031 |
| Horizontale Verschiebung in Pixel | 8 |
| Vertikale Verschiebung in Pixel | -4 |
- Blutmond am 28. September 2015 mit verschiedenen Belichtungszeiten
-
 Mit einer Belichtungszeit von einer Sekunde
Mit einer Belichtungszeit von einer Sekunde
(Belichtungsindex ISO 1600 mit -0,3 Stufen Korrektur des Belichtungswertes). -
 Mit einer Belichtungszeit von sechs Sekunden
Mit einer Belichtungszeit von sechs Sekunden
(Belichtungsindex ISO 200 ohne Korrektur des Belichtungswertes).


Bilddrehung
Bearbeiten
Bei entsprechend langen Belichtungszeiten kann es erforderlich sein, auch die Bilddrehung zu berücksichtigen. Das Bild dreht sich genauso wie die Erde einmal pro (siderischem) Tag.
Der Winkel der Bilddrehung ist daher identisch mit der Stundenwinkeldifferenz :

Am Himmelsäquator ist die Deklination , und es ergibt sich keine Rotation. In der nördlichen Hemisphäre ( ) ist die scheinbare Drehung eines Fixsterns entgegen dem Uhrzeigersinn und in der südlichen Hemisphäre ( ) im Uhrzeigersinn.



Beispiel
BearbeitenDas folgende Beispiel ist erneut mit den obigen Vorgaben für eine Brennweite von 140 Millimetern und für eine Zeitdifferenz (= Belichtungszeit) von sechs Sekunden berechnet:
| Winkel | Wert |
|---|---|
| Drehwinkel in rad | 0,00044 |
| Drehwinkel in ° | 0,02500 |
| Drehwinkel in ' | 1,50 |
| Drehwinkel in " | 90 |
Entlang einer Bildkantenlänge von 1024 Bildpunkten mit je 7,4 Mikrometern ergibt sich eine Bilddrehung um knapp einen halben Bildpunkt beziehungsweise eine Verdrehung der Bildecke um 3,3 Mikrometer.
Fourier-Transformation
Bearbeiten
Der Betrag der komplexwertigen, zweidimensionalen Fourier-Transformation der Bilddaten im Bildraum kann zur Ermittlung der spektralen Dichte der Modulationsübertragungsfunktion im Ortsfrequenzraum herangezogen werden. In der digitalen Signalverarbeitung wird hierfür häufig die sehr effiziente Fast-Fourier-Transformation (FFT) eingesetzt.
Das Leistungsdichtespektrum entspricht hierbei dem Beugungsbild der Bilddaten, das mit einem Bildschirm aufgefangen werden kann.
Beispiele
Bearbeiten- Kontrastübertragungsfunktion an Beispielen
-
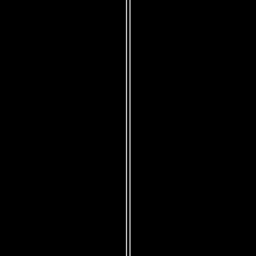 Vertikaler Doppelspalt.
Vertikaler Doppelspalt. -
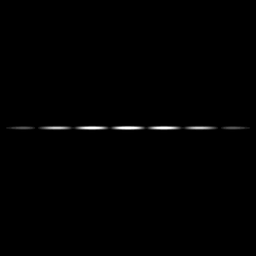 Das Leistungsdichtespektrum des vertikalen Doppelspalts. Nur die Ortsfrequenzen, die exakt in horizontaler Richtung liegen, tragen zur Kontrastübertragung bei. Die Ortsfrequenz null befindet sich in der Mitte der Beugungsbilder und nimmt radial in alle Richtungen zu.
Das Leistungsdichtespektrum des vertikalen Doppelspalts. Nur die Ortsfrequenzen, die exakt in horizontaler Richtung liegen, tragen zur Kontrastübertragung bei. Die Ortsfrequenz null befindet sich in der Mitte der Beugungsbilder und nimmt radial in alle Richtungen zu. -
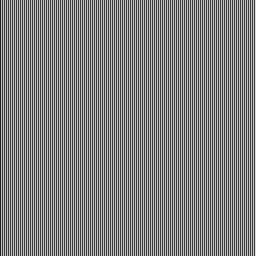 Periodisches Liniengitter.
Periodisches Liniengitter. -
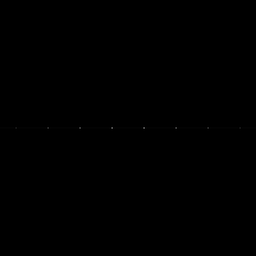 Das Leistungsdichtespektrum des Liniengitters. Nur die Ortsfrequenzen, die exakt in horizontaler Richtung liegen, tragen zur Kontrastübertragung bei. Durch die Periodizität des Liniengitters werden die Beugungsmaxima respektive die auftretenden Ortsfrequenzen schärfer und haben somit eine geringere Bandbreite.
Das Leistungsdichtespektrum des Liniengitters. Nur die Ortsfrequenzen, die exakt in horizontaler Richtung liegen, tragen zur Kontrastübertragung bei. Durch die Periodizität des Liniengitters werden die Beugungsmaxima respektive die auftretenden Ortsfrequenzen schärfer und haben somit eine geringere Bandbreite. -
 Schachbrettmuster.
Schachbrettmuster. -
 Das Leistungsdichtespektrum des Schachbrettmusters. Nur die Ortsfrequenzen, die exakt in horizontaler oder vertikaler Richtung liegen, tragen zur Kontrastübertragung bei. Durch die Periodizität des Schachbrettmusters sind die Beugungsmaxima scharf respektive haben die auftretenden Ortsfrequenzen eine geringe Bandbreite.
Das Leistungsdichtespektrum des Schachbrettmusters. Nur die Ortsfrequenzen, die exakt in horizontaler oder vertikaler Richtung liegen, tragen zur Kontrastübertragung bei. Durch die Periodizität des Schachbrettmusters sind die Beugungsmaxima scharf respektive haben die auftretenden Ortsfrequenzen eine geringe Bandbreite. -
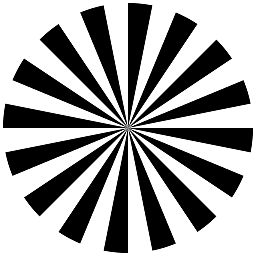 Siemensstern mit einer maximalen Ortsfrequenz von 1024 Linienpaaren pro Bildhöhe (in Originalgröße).
Siemensstern mit einer maximalen Ortsfrequenz von 1024 Linienpaaren pro Bildhöhe (in Originalgröße). -
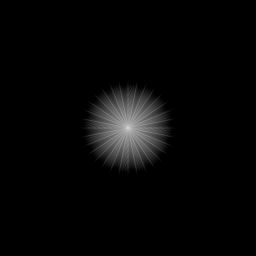
 Leistungsdichtespektrum des Siemenssterns (an den Bildkantenmitten beträgt die Ortsfrequenz 1024 Linienpaare pro Bildhöhe).
Leistungsdichtespektrum des Siemenssterns (an den Bildkantenmitten beträgt die Ortsfrequenz 1024 Linienpaare pro Bildhöhe). -
 Mit einem Tiefpass gefilterter Siemensstern mit einer maximalen Ortsfrequenz von zirka 330 Linienpaaren pro Bildhöhe - die Kanten sind breiter und wirken somit weicher, die Details in der Bildmitte sind verloren gegangen.
Mit einem Tiefpass gefilterter Siemensstern mit einer maximalen Ortsfrequenz von zirka 330 Linienpaaren pro Bildhöhe - die Kanten sind breiter und wirken somit weicher, die Details in der Bildmitte sind verloren gegangen. -
 Leistungsdichtespektrum des mit einem Tiefpass gefilterten Siemenssterns mit einer maximalen Ortsfrequenz von 330 Linienpaaren pro Bildhöhe.
Leistungsdichtespektrum des mit einem Tiefpass gefilterten Siemenssterns mit einer maximalen Ortsfrequenz von 330 Linienpaaren pro Bildhöhe.










Vorwort | Grundlagen | Beleuchtung | Bildaufnahme | Lichtwandlung | Digitale Bilder | Wiedergabe | Transformationen | Literatur