Digitale bildgebende Verfahren: Bildaufnahme


Vorwort | Grundlagen | Beleuchtung | Bildaufnahme | Lichtwandlung | Digitale Bilder | Wiedergabe | Transformationen | Literatur
Dieses Kapitel beschäftigt sich damit, wie durch Berücksichtigung der Parameter Ort und Zeit mit Hilfe von Licht orts- und zeitaufgelöste Bildinformation gewonnen werden kann und welche Komponenten, Verfahren und optischen Geräte dafür häufig zum Einsatz kommen.
Die Lichtwandlung mit Bildsensoren wird im eigenen Kapitel Lichtwandlung behandelt.
Objektive
Bearbeiten
Objektive sind lichtsammelnde Geräte, die eine reelle optische Abbildung von Objekten erzeugen.
Grundsätzlich können Objektive als dioptrische, als kataoptrische oder als katadioptrische Systeme gestaltet werden. Dioptrische Systeme (von griechisch "διοπτρον", "Visier") verwenden durchsichtige Elemente und kataoptrische Systeme (von griechisch "κάτοπτρον", "Spiegel") verwenden reflektierende Elemente, um eine optische Abbildung zu erzeugen. Bei katadioptrischen Systemen werden durchsichtige und reflektierende Elemente kombiniert, was zum Beispiel zweckmäßig sein kann, wenn Teleskope, Ultrakurzdistanzprojektoren oder 360-Grad-Panoramakameras in kompakter Form gebaut werden sollen.
Durchsichtige Elemente mit gewölbten Oberflächen, wie zum Beispiel Glaslinsen, lenken das Licht durch Brechung ab. Eine Alternative stellen lichtbeugende Elemente dar. Für die Ablenkung des Lichtes können auch durchsichtige oder reflektierende Zonenplatten eingesetzt werden. Die Stärke der Brechung und der Beugung von Licht sind von dessen Wellenlänge abhängig, so dass hierbei im Gegensatz zu reflektierenden Elementen Dispersion auftritt.
Bei der Aufnahme spielen die Eigenschaften der verwendeten Objektive eine entscheidende Rolle. Moderne Objektive haben konstruktionsbedingte Abbildungsfehler sogar in Abhängigkeit von eingestellter Brennweite, Objektweite und Blendenzahl digital im Objektiv gespeichert und können sie dank eines eigenen Prozessors an die kamerainterne Bildverarbeitung übermitteln, so dass sie in den digitalen Rasterbildern zusammen mit den aufgenommenen Bilddaten als Metadaten (zum Beispiel im Exchangeable Image File Format (EXIF)) gespeichert oder von der Kamera unmittelbar ausgewertet werden können. Somit ist es beispielsweise möglich, den Randlichtabfall, den Farbquerfehler oder die Verzeichnung der optischen Abbildung rechnerisch zu kompensieren.
Durch die stetige digitale Kommunikation zwischen der Objektiv- und der Kamera-Firmware ist es darüberhinaus auch möglich, in verschiedenen Aufnahmesituationen automatisch optimale Abbildungsparameter zu wählen. Sogar während der Aufnahme können beispielsweise die optomechanischen Bildstabilisierungen in einem Kameragehäuse und in einem Objektiv kombiniert und synchronisiert werden. Ferner kann die Objektentfernung kontinuierlich verändert werden, um zum Beispiel Fokus Stacking zu ermöglichen, oder die Aperturblende kann unmittelbar und stufenlos sich ändernden Lichtbedingungen angepasst werden.
Objektivarten
Bearbeiten
Links: Bei einer gegenstandsseitig entozentrischen Abbildung wird die hintere Rohröffnung kleiner abgebildet als die vordere Rohröffnung und ist somit sichtbar.
Mitte: Bei einer gegenstandsseitig telezentrischen Abbildung wird die hintere Rohröffnung genauso groß abgebildet wie die vordere Rohröffnung und ist somit deckungsgleich.
Rechts: Bei einer gegenstandsseitig perizentrischen Abbildung wird die hintere Rohröffnung größer abgebildet als die vordere Rohröffnung und ist in der Projektion somit als äußerer Rand der Mantelfläche des Rohres zu sehen.

Es kann zwischen herkömmlichen (oder auch entozentrischen), telezentrischen und perizentrischen (oder auch hyperzentrischen) Objektiven unterschieden werden:
- Bei einer gegenstandsseitig entozentrischen (das perspektivische Zentrum liegt im Inneren) Abbildung wird der Abbildungsmaßstab mit zunehmender Objektweite immer kleiner. Objekte gleicher Größe werden bei größerer Entfernung vom Aufnahmegerät kleiner abgebildet als bei kleiner Entfernung vom Aufnahmegerät. Bei einer herkömmlichen optischen Abbildung ist die Schärfentiefe bei einem Objekt im Brennpunkt vor der ersten Hauptebene, der nach unendlich abgebildet wird, gleich null, beziehungsweise der Abbildungsmaßstab ist unendlich.
- Bei einer gegenstandsseitig telezentrischen (das perspektivische Zentrum liegt in der Ferne) Abbildung ist der Abbildungsmaßstab unabhängig von der Objektweite. Objekte gleicher Größe haben unabhängig von ihrer Entfernung vom Aufnahmegerät immer mit die gleiche Bildgröße.
- Bei einer gegenstandsseitig perizentrischen (das perspektivische Zentrum liegt im Äußeren) Abbildung wird der Abbildungsmaßstab mit zunehmender Objektweite immer größer. Objekte gleicher Größe werden bei größerer Entfernung vom Aufnahmegerät größer abgebildet als bei kleiner Entfernung vom Aufnahmegerät. Dies erfordert besonders große und aufwendig konstruierte Objektive, die ein Objekt aus mehreren Richtungen gleichzeitig erfassen können. Die perspektivischen Projektionen solcher Objektive wirken unnatürlich, können aber zum Beispiel zur einfachen Begutachtung von voluminösen Objekten unter Umständen sinnvoll eingesetzt werden.
Telezentrie
BearbeitenBei digitalen Bildsensoren ist es nützlich, bildseitig telezentrische Objektive einzusetzen, da diese wegen des weitgehend parallelen Strahlenganges geringere Aberrationen durch die optisch wirksamen Elemente auf dem Bildsensor (wie etwa Mikrolinsen, Sperrfilter oder Farbfilter) verursachen und damit Bilder mit größerer Auflösung ermöglichen.
Mit beidseitig telezentrischen Objektiven ist der Abbildungsmaßstab in großen Bereichen unabhängig von der Objektweite und der Lage des Bildsensors auf der optischen Achse. Dieses Verhalten kann zur Überprüfung von Objektmaßen bei variabler, oder sogar unbekannter Objektweite ausgenutzt werden.
Ferner weist ein beidseitig telezentrischer Strahlengang eine hohe Schärfentiefe auf. Bei einem beidseitig telezentrischen Strahlengang mit zwei gespiegelten, konfokal angeordneten Objektiven ist die Schärfentiefe genauso groß wie die Brennweite, beziehungsweise kann der Bildsensor um eine Brennweite entlang der optischen Achse verschoben werden, ohne dass die durch die Defokussierung verursachten Zerstreuungskreise mehr als halb so groß werden, wie die Aperturblende zwischen den beiden Objektiven. Für eine hohe Messgenauigkeit ist eine entsprechend kleine Aperturblende erforderlich, wobei diese gegebenenfalls durch Beugung auflösungsbegrenzend wirkt.
- Beidseitig telezentrische Abbildungen
-
 Beidseitig telezentrische Abbildung mit konstantem Abbildungsmaßstab für verschiedene Objektweiten mit zwei, konfokal zum Punkt F angeordneten Objektiven der gleichen Brennweite f. In der gemeinsamen Brennebene befindet sich eine Aperturblende. Ein Objekt bei doppelter Brennweite wird in die zweite Hauptebene H' abgebildet (blau). Alle Objekte die sich näher an der ersten Hauptebene H befinden, werden reell hinter die zweite Hauptebene H' abgebildet, wobei die Bildgröße und somit der Abbildungsmaßstab nicht variieren. Ein Objekt, das sich genau im Brennpunkt vor der ersten Hauptebene befindet, wird genau in den Brennpunkt hinter der zweiten Hauptebene abgebildet (rot).
Beidseitig telezentrische Abbildung mit konstantem Abbildungsmaßstab für verschiedene Objektweiten mit zwei, konfokal zum Punkt F angeordneten Objektiven der gleichen Brennweite f. In der gemeinsamen Brennebene befindet sich eine Aperturblende. Ein Objekt bei doppelter Brennweite wird in die zweite Hauptebene H' abgebildet (blau). Alle Objekte die sich näher an der ersten Hauptebene H befinden, werden reell hinter die zweite Hauptebene H' abgebildet, wobei die Bildgröße und somit der Abbildungsmaßstab nicht variieren. Ein Objekt, das sich genau im Brennpunkt vor der ersten Hauptebene befindet, wird genau in den Brennpunkt hinter der zweiten Hauptebene abgebildet (rot). -
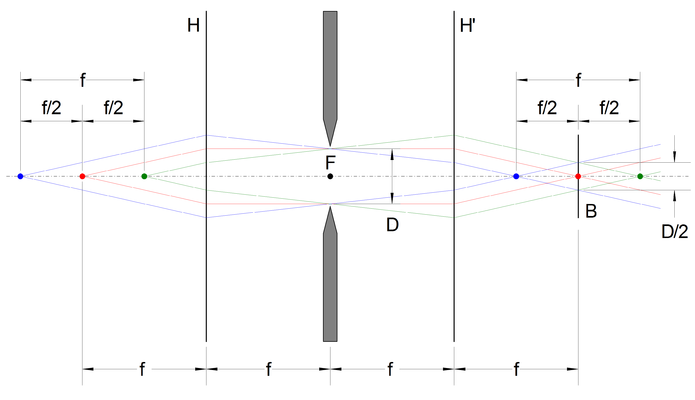 Zur Schärfentiefe bei einer beidseitig telezentrischen Abbildung mit zwei, konfokal zum Punkt F angeordneten Objektiven der gleichen Brennweite f: Der rote Punkt wird geometrisch scharf in die Brennebene B hinter der zweiten Hauptebene H' abgebildet. Alle Objekte, die sich zwischen der eineinhalbfachen und der halben Brennweite vor der ersten Hauptebene H befinden werden noch hinreichend scharf mit einem Zerstreuungskreis abgebildet. Der akzeptable Durchmesser des Zerstreuungskreises ist in diesem Fall halb so groß wie die Öffnungsweite D, und sowohl die objektseitige als auch die bildseitige die Schärfentiefe betragen f.
Zur Schärfentiefe bei einer beidseitig telezentrischen Abbildung mit zwei, konfokal zum Punkt F angeordneten Objektiven der gleichen Brennweite f: Der rote Punkt wird geometrisch scharf in die Brennebene B hinter der zweiten Hauptebene H' abgebildet. Alle Objekte, die sich zwischen der eineinhalbfachen und der halben Brennweite vor der ersten Hauptebene H befinden werden noch hinreichend scharf mit einem Zerstreuungskreis abgebildet. Der akzeptable Durchmesser des Zerstreuungskreises ist in diesem Fall halb so groß wie die Öffnungsweite D, und sowohl die objektseitige als auch die bildseitige die Schärfentiefe betragen f. -
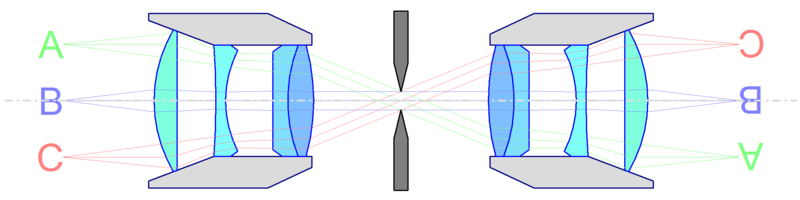 Beispiel für eine beidseitige telezentrische Abbildung mit zwei konfokal angeordneten Objektiven, die im gemeinsamen Brennpunkt (für Objekte und Bilder in unendlicher Weite) mit einer Blende versehen sind.
Beispiel für eine beidseitige telezentrische Abbildung mit zwei konfokal angeordneten Objektiven, die im gemeinsamen Brennpunkt (für Objekte und Bilder in unendlicher Weite) mit einer Blende versehen sind. -
 Beispiel für eine beidseitige telezentrische Abbildung mit zwei konfokal angeordneten Spiegelteleskopen, die im gemeinsamen Brennpunkt (für Objekte und Bilder in unendlicher Weite) mit einer Blende versehen sind.
Beispiel für eine beidseitige telezentrische Abbildung mit zwei konfokal angeordneten Spiegelteleskopen, die im gemeinsamen Brennpunkt (für Objekte und Bilder in unendlicher Weite) mit einer Blende versehen sind.




Retrofokusobjektiv
Bearbeiten
Retrofokusobjektive können eingesetzt werden, wenn die Brennweite kürzer sein soll, als es der minimale Abstand zwischen Objektiv und Bildebene zulässt, zum Beispiel weil an dieser Stelle erforderliche optische Elemente, wie Prismen oder Umlenkspiegel in den Strahlengang gebracht werden sollen.
Ein Retrofokusobjektiv kann beispielsweise durch das Hinzufügen einer Zerstreuungslinse vor dem lichtsammelnden System realisiert werden. In diesem Fall wird die effektive Öffnungsweite des Systems kleiner als der größte Strahlquerschnitt und die größte Sammellinse im Strahlengang. Die scheinbare Hauptebene des Systems liegt bildseitig hinter der letzten Linse.

Wenn der Brennpunkt der Sammellinse mit dem Hauptpunkt der Zerstreuungslinse übereinstimmt und beide Linsen die gleiche Brennweite haben, ist die Brennweite des Gesamtsystems gemessen von der scheinbare Hauptebene Hb ebenfalls .

Telefokusobjektiv
Bearbeiten
Bei Telefokusobjektiven liegt die scheinbare Hauptebene objektseitig vor der ersten Linse im Strahlengang. Auf diese Weise können Objektive gebaut werden, deren Baulänge kürzer ist als deren wirksame Brennweite. Ferner können bei unzugänglichen aufzunehmenden Objekten mit Telefokusobjektiven auch bei kleineren Objektweiten lange Brennweiten eingesetzt werden.
Ein Telefokusobjektiv kann beispielsweise durch das Hinzufügen einer Zerstreuungslinse hinter dem lichtsammelnden System realisiert werden. In diesem Fall ist die wirksame Öffnungsweite des Systems kleiner als die Frontlinse des Objektivs.
Wenn der Brennpunkt der Sammellinse mit dem Hauptpunkt der Zerstreuungslinse übereinstimmt und beide Linsen die gleiche Brennweite haben, beträgt die wirksame Brennweite des Gesamtsystems gemessen von der scheinbaren Hauptebene Hb . In diesem Fall ist allerdings keine Bildaufnahme bei unendlicher Objektweite möglich, da das Bild dann innerhalb der Zerstreuungslinse entsteht.

Makroobjektiv
Bearbeiten

Mit einem Makroobjektiv können Nahaufnahmen mit großem Abbildungsmaßstab gemacht werden. Der Betrag des Abbildungsmaßstabs ist in der Regel größer als ein Viertel, kann aber auch ohne weiteres größer als eins sein. Beim Abbildungsmaßstab eins ist die Objektweite identisch mit der Bildweite, und beide Werte sind vom Betrag doppelt so groß wie die Brennweite des konvergenten Abbildungsystems.
Ein fokussierbares Objektiv hat in der Regel einen minimale Objektweite , in der noch ein hinreichend scharfes Bild erzeugt werden kann. Bei Kamerasystemen ist es allerdings möglich, durch die Verwendung von geeigneten und gegen Streulicht abgeschirmten und geschützten Zwischenringen oder Balgengeräten zwischen dem Objektivanschluss und dem Kameraanschluss die Bildweite zu vergrößern, so dass auch kleinere Objektweiten scharfgestellt werden können.
Bei vorgegebener Brennweite und bei minimaler Objektweite können die Bildweite , die Objektweite und der Abbildungsmaßstab in Abhängigkeit und der Länge des Zwischenrings wie folgt bestimmt werden:








Für den Sonderfall, dass das Objektiv auf unendliche Objektweite ( ) eingestellt ist (hier entspräche also die Bildweite der Brennweite ), jedoch bildseitig mit einem Zwischenring der Länge versehen wird, ergibt sich:



In diesem Fall gilt für den Aufnahmeabstand d zwischen Objekt und Bildebene:

Hierbei ist gegebenenfalls zu beachten, dass viele Objektive über mehrere Hauptebenen verfügen, so dass der Abstand zwischen den beiden äußersten Hauptebenen unter Umständen noch zu dem solchermaßen berechneten Aufnahmeabstand hinzugerechnet werden muss.
Wenn der Abbildungsmaßstab größer als eins werden soll, kann es sinnvoll sein, das verwendete Objektiv umzudrehen (Retrostellung), um Einschränkungen bei der Bildqualität zu verringern.
- Bildebenensymbol
-
 Der Strich in diesem nach DIN 4522-11 standardisierten Symbol kennzeichnet an einem Kameragehäuse die Lage der Bildebene.
Der Strich in diesem nach DIN 4522-11 standardisierten Symbol kennzeichnet an einem Kameragehäuse die Lage der Bildebene. -
 Relief des Bildebenensymbols auf der Oberseite eines Kameragehäuses aus dunklem Kunststoff.
Relief des Bildebenensymbols auf der Oberseite eines Kameragehäuses aus dunklem Kunststoff.


Lichtausbeute
BearbeitenEs ist insbesondere bei Nahaufnahmen mit geringer Objektweite und beim Einsatz von Zwischenringen zu beachten, dass bei konstanter Bildfläche mit entsprechend großen Bildweiten und Abbildungsmaßstäben die genutzten Bildwinkel und somit auch die im Bild genutzten Lichtströme geringer werden. Bei einem Abbildungsmaßstab von 1/2 ist die Lichtausbeute im Verhältnis zu einer Abbildung aus dem Unendlichen (also beim Abbildungsmaßstab 0) bereits nur noch 4/9, bei einem Abbildungsmaßstab von 1 nur noch 1/4 und bei einem Abbildungsmaßstab von 2 sogar nur noch 1/9.
Die relative Lichtausbeute ergibt sich zu:


Dies ist gleichbedeutend mit einer scheinbaren Vergrößerung der Blendenzahl auf den Wert der effektiven Blendenzahl :



Dieser Wert kann auch in einen Wert für die Anzahl der Blendenstufen umgerechtet werden, bei der die gleiche Lichteinbuße durch das Abblenden der Aperturblende erreicht wird. Die zwei Blendenzahlen und unterscheiden sich durch die folgende Anzahl von Blendenstufen :


In der folgenden Tabelle sind für verschiedene auf die Brennweite normierte Objektweiten jeweils die entsprechende Bildweite , der dazugehörige Abbildungsmaßstab , die relative Lichtausbeute und der Wert des Lichtverlusts in Blendenstufen angegeben:

| Objekt- weite |
Bild- weite |
Abbildungs- maßstab |
Relative Lichtausbeute |
Blenden- stufen |
|---|---|---|---|---|
| 1000 | 1,001 | 0,001 | 1,00 | 0,003 |
| 100 | 1,01 | 0,010 | 0,98 | 0,029 |
| 10 | 1,11 | 0,111 | 0,81 | 0,30 |
| 3,0 | 1,50 | 0,500 | 0,44 | 1,17 |
| 2,0 | 2,00 | 1,00 | 0,25 | 2,0 |
| 1,5 | 3,00 | 2,00 | 0,11 | 3,2 |
Kollimator
Bearbeiten
Ein Kollimator dient zur Erzeugung paralleler Strahlenbündel. Der Vorteil dieser parallelen Strahlenbündel besteht darin, dass sich diese in beliebigem Abstand hinter dem Kollimator nicht verändern und bildseitige optische Geräte nicht auf den Abstand zum Kollimator eingestellt werden müssen. Da ein Kollimator ins Unendliche abbildet, müssen nachfolgende optische Geräte, wie zum Beispiel ein Beobachtungsfernrohr, objektseitig stets auf unendliche Objektweite eingestellt sein, damit sie eine scharfe optische Abbildung im Endlichen erzeugen können.
Wenn es nicht auf eine hohe optische Auflösung ankommt, wie zum Beispiel in einem Beleuchtungsstrahlengang, sind die Anforderungen an die Kollimation nicht besonders hoch, so dass ein einfacher optischer Kollektor in Form einer plan-konvexen Linse eingesetzt werden kann.
Siehe hierzu auch Kondensor.
Zonenplatten
Bearbeiten
Statt Glaslinsen oder in Ergänzung zu Glaslinsen können auch Fresnelsche Zonenplatten eingesetzt werden, um Licht abzulenken und eine optische Abbildung zu erzeugen.
Optische Medien haben eine Brechzahl größer als eins und eine entsprechende Dispersion, so dass kurzwelliges Licht stärker gebrochen wird als langwelliges. Im Gegensatz dazu beruhen Zonenplatten auf Beugungseffekten, bei denen Licht mit kurzer Wellenlänge schwächer gebeugt wird als Licht mit langer Wellenlänge. Bei geschickter Kombination von Linsen und Zonenplatten in einem Objektiv können deren Farbfehler kompensiert werden.
Fabry-Linse
Bearbeiten



Soll ein Objektpunkt geometrisch nicht als Bildpunkt abgebildet werden, weil zum Beispiel in einem hochempfindlichen Photometer ein flächenhafter Detektor für die Messung eines Lichtstroms eingesetzt werden soll, kann an der Stelle des Bildes eines Objektivs eine Feldblende als Austrittsluke in den Strahlengang gebracht werden. Hinter dieser Blende wird dann eine zusätzliche sammelnde Fabry-Linse angeordnet, die den Strahlengang aufweitet und das Licht auf die Detektorfläche projiziert.
Die Abbildungsparameter dieses Strahlengangs können mit Hilfe der Brennweite des Objektivs , der Brennweite der Fabry-Linse , der Öffnungsweite des Objektivs , der Öffnungsweite der Fabry-Linse , der Detektorweite sowie den geometrischen Längenparametern (Abstand zwischen Feldblende und Hauptebene der Fabry-Linse) und (Abstand zwischen Fabry-Linse und Messebene) in Beziehung gesetzt werden. Bei unendlicher Objektweite ( ) ist die Bildweite gleich der Brennweite ( ), und es gilt:











Befindet sich die Feldblende genau im objektseitigen Brennpunkt der Fabry-Linse und werden die Blendenzahlen und eingeführt


- ,


vereinfachen sich diese Beziehungen zu:
- für


- für

Die Blendenzahlen von Objektiv und Fabry-Linse sind in diesem Fall also gleich, und die Detektorsweite ist identisch mit der Öffnungsweite der Fabry-Linse .
Beugungsbegrenzung
BearbeitenAlle optischen Abbildungen mit Objektiven sind in der Auflösung beugungsbegrenzt, da das Auflösungsvermögen immer durch Beugung an Kanten eingeschränkt wird. Ein Objektpunkt wird also nie als Punkt abgebildet, sondern immer als Beugungsfigur, die für jeden Punkt der Abbildung, wo Beugung auftritt, mit einer Gaußschen Glockenfunktion (also einer Normalverteilung) beschrieben werden kann. Im Allgemeinen müssen alle Punkte berücksichtigt werden, an denen Beugung auftritt, und die Beugungsverteilungen aller einzelnen Punkte müssen unter Berücksichtigung der Amplituden und Phasen der komplexwertigen Wellenfunktionen überlagert werden, um das gesamte aus der Interferenz resultierende Verteilungsmuster zu erhalten.
- Beugungsscheibchen
-
 Durch die Wellenoptik (Fourier-Optik) bedingte Gaußsche Normalverteilung einer endlichen Anzahl von in der Bildebene eintreffender Photonen, die von einem Objektpunkt ausgehend rein geometrisch-optisch betrachtet alle exakt in die Bildmitte abgebildet würden.
Durch die Wellenoptik (Fourier-Optik) bedingte Gaußsche Normalverteilung einer endlichen Anzahl von in der Bildebene eintreffender Photonen, die von einem Objektpunkt ausgehend rein geometrisch-optisch betrachtet alle exakt in die Bildmitte abgebildet würden. -
 Berechnetes Beugungsbild einer idealen Kreislochblende. Der Durchmesser des zentralen Beugungsscheibchens ergibt sich aus der nullten Beugungsordnung, die weiteren konzentrischen Beugungsringe entstehen durch die Berücksichtigung der höheren Beugungsordnungen.
Berechnetes Beugungsbild einer idealen Kreislochblende. Der Durchmesser des zentralen Beugungsscheibchens ergibt sich aus der nullten Beugungsordnung, die weiteren konzentrischen Beugungsringe entstehen durch die Berücksichtigung der höheren Beugungsordnungen. -
 Photographisch aufgenommenes Beugungsbild einer 0,09 Millimeter großen, mit rotem Laserlicht beleuchteten Lochblende in 65 Millimetern Entfernung, in dem die 0. (Beugungsscheibchen in der Mitte mit dem Durchmesser von gut einem Millimeter) bis 27. Beugungsordnung (links oben) zu sehen sind.
Photographisch aufgenommenes Beugungsbild einer 0,09 Millimeter großen, mit rotem Laserlicht beleuchteten Lochblende in 65 Millimetern Entfernung, in dem die 0. (Beugungsscheibchen in der Mitte mit dem Durchmesser von gut einem Millimeter) bis 27. Beugungsordnung (links oben) zu sehen sind.




Der Durchmesser beziehungsweise der Winkeldurchmesser eines Beugungsscheibchens, das von einer kreisförmigen Blende mit dem Durchmesser in einer Bildebene im Abstand hervorgerufen wird, die im Verhältnis zur Wellenlänge des untersuchten Lichtes weit von der Blende entfernt ist ( ), ergeben sich wie folgt:





Erzeugt ein Objektiv mit der Öffnungsweite eine optische Abbildung in einer Bildebene mit der Bildweite kann der Quotient dieser beiden Größen durch die Blendenzahl des Objektivs ersetzt werden:

Der Durchmesser und die Fläche des kreisförmigen Beugungsscheibchens ergeben sich dann also wie folgt:



Das Intensitätsprofil eines Beugungsscheibchens kann mit Hilfe der Bessel-Funktion erster Gattung als bestimmtes Integral über das abgeschlossene Intervall [0, π] beschrieben werden:

Die Lichtintensität senkrecht zur optischen Achse, die durch den Punkt bei x=0 geht, ergibt sich dann wie folgt, wobei lediglich eine Proportionalitätskonstante ist:


Die Beugungsscheibchen von zwei punktförmigen Objekten überlagern sich und können in der Bildebene bei zu geringem seitlichen Versatz nicht unterschieden werden. Erst ab einem Abstand vom Radius des Beugungsscheibchens (Rayleigh-Kriterium mit ) ist es es in der Praxis möglich, die beiden Bilder der beiden Objektpunkte zu unterscheiden. Je weiter die beiden Objekte auseinanderliegen, desto besser können sie im Bild unterschieden werden.

Bei einem Abstand, der dem Durchmesser des Beugungsscheibchens entspricht ( ), sind die beiden Objekte sehr gut zu unterscheiden, wenn sie geometrisch einwandfrei - also ohne Abbildungsfehler - abgebildet werden:

| Besselfunktion für Beugungsscheibchen mit | Beugungsscheibchen im Bild |
|---|---|
.png) Ohne Überlagerung - ein Bildpunkt |
.jpg)
|
.plus.I(x%2B0.5).png) Überlagerung mit Abstand 0,5 zwei Bildpunkte praktisch nicht unterscheidbar, die Modulation zwischen den beiden Maxima beträgt unter 1% |
.plus.I(x%2B0.5).jpg)
|
.plus.I(x%2B1).png) Überlagerung mit Abstand 1,0 zwei Bildpunkte gut unterscheidbar, die Modulation zwischen den beiden Maxima beträgt fast 90% |
.plus.I(x%2B1).jpg)
|

Wenn bildseitig ein maximaler Durchmesser für das Beugungsscheibchen definiert werden kann, folgt daraus unmittelbar die maximale Blendenzahl beziehungsweise bei gegebener Brennweite die minimale Öffnungsweite für das optische System der optischen Abbildung:





Durch die Beugungsbegrenzung können auch zwei dunkle Objekte vor hellem Hintergrund nicht beliebig genau aufgelöst werden. Dieser Effekt wurde zum Beispiel nach der Erfindung des Fernrohrs bei Merkur- und Venusdurchgängen vor der Sonnenscheibe beobachtet. Bei der sogenannten Tröpfchenbildung verschmilzt das Schattenbild der Planeten mit der dunklen Umgebung der Sonnenscheibe, während sich der Planet noch vollständig innerhalb der Sonnenscheibe befindet. Dass dieser Effekt umso stärker ist, je kleiner die Öffnungsweite der optischen Instrumente ist (beziehungsweise je mehr diese optischen Instrumente beugungsbegrenzt sind), war beim Merkurtransit im Mai 1832 durch die beiden deutschen Astronomen Friedrich Wilhelm Bessel und Wilhelm August Argelander nachgewiesen geworden.
- Zwei schwarze Objekte vor weißem Hintergrund
-
 Streng geometrische Abbildung bei punktförmiger Berührung zweier schwarzer Kreise.
Streng geometrische Abbildung bei punktförmiger Berührung zweier schwarzer Kreise. -
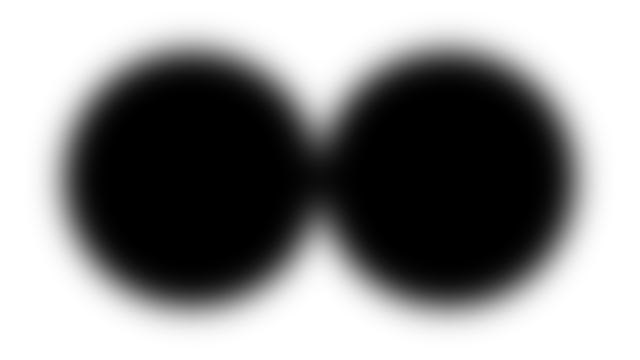 Tropfenphänomen im Bereich des Kontakts bei beugungsbegrenzter optischer Abbildung dieser beiden Kreise.
Tropfenphänomen im Bereich des Kontakts bei beugungsbegrenzter optischer Abbildung dieser beiden Kreise. -
 Bereich des Scheitels eines schwarzen Kreises an einer nicht berührten, senkrechten schwarzen Kante bei geometrischer Abbildung.
Bereich des Scheitels eines schwarzen Kreises an einer nicht berührten, senkrechten schwarzen Kante bei geometrischer Abbildung. -
 Tropfenphänomen im Bereich des Scheitels eines schwarzen Kreises an einer einer nicht berührten schwarzen Kante bei beugungsbegrenzter optischer Abbildung. Bei der scheinbaren Wölbung des oberen und des unteren Endes der senkrechten Kante nach links hin handelt es sich um eine optische Täuschung.
Tropfenphänomen im Bereich des Scheitels eines schwarzen Kreises an einer einer nicht berührten schwarzen Kante bei beugungsbegrenzter optischer Abbildung. Bei der scheinbaren Wölbung des oberen und des unteren Endes der senkrechten Kante nach links hin handelt es sich um eine optische Täuschung.




Wenn bei einer Kamera gefordert ist, dass der Durchmesser des Beugungsscheibchens die Größe der Bildelemente (Pixel) nicht überschreiten soll, ergibt sich beispielsweise bei einer Größe der Bildelemente von zwei Mikrometern und einer Lichtwellenlänge von 550 Nanometern eine maximale Blendenzahl von 1,5. Bei einer Brennweite von 75 Millimetern entspräche diese Blendenzahl einer Öffnungsweite von 50 Millimetern. Bei größeren Blendenzahlen als respektive kleineren Öffnungsweiten als arbeitet die Kamera beugungsbegrenzt.

In der folgenden Tabelle sind die maximalen Blendenzahlen angegeben, bei den bei verschiedenen Bilddiagonalen (respektive Bildkreisdurchmessern) und Bildauflösungen gearbeitet werden kann, wenn die quadratischen Aufnahmen bei einer Wellenlänge von 550 Nanometern nicht beugungsbegrenzt sein sollen. Werden größere Blendenzahlen als diese verwendet, sind die aufgenommenen Bilder in Bezug auf das Auflösungsvermögen des optischen Systems beugungsbegrenzt. Bei größeren Wellenlängen sind die maximalen Blendenzahlen noch kleiner, bei kurzen Wellenlängen kann auch mit etwas größeren maximalen Blendenzahlen ohne Beugungsbegrenzung gearbeitet werden. Bei Bildsensoren ohne Farbfilter oder bei unbunten Objekten beziehungsweise Abbildungen verdoppelt sich in der Bildebene die maximal erreichbare Auflösung gegenüber den in der folgenden Tabelle angegebenen Werten, da unter diesen Bedingungen in jedem Bildpunkt die vollständige gewünschte Bildinformation vorhanden ist.
| Maximale Blendenzahlen bei Bayer-Sensoren ohne Beugungsbegrenzung | ||||
| Bildauflösung in Millionen Bildpunkten | ||||
| 1,0 | 4,2 | 16,8 | 67,1 | |
| Bilddiagonale in Millimetern (Bildsensorklasse) |
||||
| 5,6 (Miniatur) | 2,9 | 1,4 | 0,72 | (0,36) |
| 11 (Kompakt) | 5,7 | 2,8 | 1,4 | 0,71 |
| 16 (1-Zoll) | 8,2 | 4,1 | 2,0 | 1,0 |
| 22 (MFT) | 11 | 5,6 | 2,8 | 1,4 |
| 27 (APS-C) | 14 | 6,9 | 3,4 | 1,7 |
| 43 (Vollformat) | 22 | 11 | 5,6 | 2,8 |
| 54 (Mittelformat) | 28 | 14 | 6,9 | 3,4 |
Auch wenn Objektive mit der Lichtstärke 0,5 gebaut werden können, werden diese nicht für photographische Zwecke eingesetzt. Objektive mit einer kleineren Blendenzahl als 0,7 haben in der Regel sehr große Abbildungsfehler (Aberration), die sich viel stärker auswirken als die Beugungsbegrenzung. Der Arbeitsbereich der Blende, bei dem sich Beugungsbegrenzung und sphärische Aberration bei der Abbildung auf der optischen Achse in der Waage halten, wird auch kritische Blende genannt (siehe unten). Hier ergibt sich das optimale Auflösungsvermögen für die entsprechende Abbildung. Im Übrigen sollte immer berücksichtigt werden, dass selbst wenn alle Abbildungsfehler auf der Achse optisch weitgehend korrigiert sind, wie zum Beispiel bei der Verwendung apochromatischer Objektive, dass immer eine Reihe von weiteren Abbildungsfehlern vorhanden ist, die das optische Auflösungsvermögen zu den Bildrändern und -ecken hin erniedrigen.
Im allgemeinen kann festgestellt werden, dass die Blendenzahl der jeweiligen kritische Blende umso kleiner ist, je kleiner die Bilddiagonale ist. Bei sehr kleinen Bilddiagonalen mit optisch gut korrigierten Objektiven, wie zum Beispiel bei hochwertigen Smartphone-Kameras, ergibt sich oft eine kritische Blendenzahl um 2,0, bei größeren Bilddiagonalen, wie zum Beispiel 43 Millimeter beim Kleinbildformat, liegt die kritische Blendenzahl oft im Bereich von 5,6.
Abhängigkeit des beugungsbegrenzten Auflösungsvermögens von der Objektweite
Bearbeiten
Zum Zusammenhang zwischen diesem Beugungsscheibchen in der Bildebene mit der Bildweite bei der optischen Abbildung eines Objekts mit der Objektweite über die Hauptebene und der entsprechenden minimalen geometrischen Größe in der Objektebene (synonym für "Gegenstandsebene") möge die die Abschätzung dienen, dass die Größe des Beugungsscheibchens mit Hilfe des Strahlensatzes einer Scheibe mit dem Durchmesser in der Objektebene rein geometrisch ins Verhältnis gesetzt werden kann (siehe Abbildung rechts):







- ,

wobei der Abbildungsmaßstab ist.
Den Durchmesser des Beugungsscheibchens erhält man aus der bekannten Abhängigkeit von der Wellenlänge und der Blendenzahl (siehe oben):

Bei einer Abbildung, bei der die Objektweite deutlich größer als die Brennweite ist ( ), ist die Bildweite nur sehr geringfügig größer als die Brennweite (daraus folgt ), so dass sich in der Objektebene G der folgende minimale Kreisdurchmesser ergibt:



Kleinere Strukturen können aufgrund der Beugungsbegrenzung nicht vollständig aufgelöst werden.
Bei einer Öffnungsweite von 100 Millimetern und bei grünem Licht mit einer Wellenlänge von 550 Nanometern ergeben sich in Abhängigkeit von der Objektweite also diese maximalen optischen Auflösungen :
| Objektweite |
Maximal auflösbare Struktur im Objektraum |
|---|---|
| 100 mm | 1,3 µm |
| 1 m | 13 µm |
| 10 m | 130 µm |
| 100 m | 1,3 mm |
| 1 km | 13 mm |
| 10 km | 130 mm |
| 100 km | 1,3 m |
| 1000 km | 13 m |
| 10000 km | 130 m |
| 100000 km | 1,3 km |
Beugungsbegrenztes Auflösungsvermögen bei Teleskopen
BearbeitenSterne können wegen ihrer großen Entfernung gar nicht aufgelöst werden und erscheinen in optischen Abbildungen daher immer als Beugungsscheibchen. Vom 300000 Kilometer entfernten Mond aus gesehen, kann die Erdoberfläche hierbei also nur in zirka vier Kilometer große Scheibchen aufgelöst werden. Geostationäre Satelliten, die einen Abstand von rund 36000 Kilometern über der Erdoberfläche haben, könnten mit einer entsprechenden Kamera nur Strukturen auflösen, die knapp fünfhundert Meter groß sind. Kameras in Satelliten in erdnäheren Umlaufbahnen von einigen 100 Kilometern Höhe haben eine Auflösung von einigen Metern. Flugzeuge in der Atmosphäre können hingegen bei ausreichend niedriger Flughöhe und hinreichend geringen atmosphärischen Störungen mit ihren Luftbildkameras durchaus optische Auflösungen im Zentimeterbereich erreichen, wie sie zum Beispiel bei modernem Navigationskartenmaterial üblich ist.
Bei Teleskopen ist die Objektweite im Verhältnis zur Brennweite in der Regel sehr groß und der kleinste Winkel zwischen zwei kontrastreichen Objekten (zum Beispiel ein Doppelstern) ergibt sich als Maß des Auflösungsvermögens aus dem halben Durchmesser des Beugungsscheibchens (siehe oben):


Für sehr kleine Winkel gilt im Bogenmaß die Näherung:

Damit ergibt sich:

Durch Substitution von folgt daraus:

Setzt man den Bildwinkel mit diesem Auflösungsvermögen ins Verhältnis, ergibt sich für die maximale Anzahl in einer Bildrichtung auflösbaren Bildpunkte :


Für die kleinen Bildwinkel, die bei Teleskopen üblicherweise erreicht werden, ergibt sich mit dem Bildkreisdurchmesser im Bogenmaß gleichermaßen die Näherung:

Damit gilt:

Für die Informationsübertragung sind zwei benachbarte Punkte unterschiedlichen Kontrast erforderlich (siehe auch Grundlagen / Modulationsübertragung), so dass die Anzahl der Linienpaare pro Bildkreisdurchmesser nur halb so groß ist:


Bei dieser Ortsfrequenz (siehe auch Ortsfrequenz) wird nur ein sehr schwacher Kontrast übertragen. Bei der doppelten Ortsfrequenz ist der Kontrastverlust durch die Beugungsbegrenzung bereits fast vernachlässigbar (siehe oben).
Bildschärfeverluste durch Abblenden
Bearbeiten
Anhand eines kleinen Ausschnitts einer photographischen, nicht beugungsbegrenzten Aufnahme mit einem hochwertigen und korrigierten Objektiv kann demonstriert werden, wie sich die Beugungsbegrenzung beim Abblenden auswirkt, wenn die Aufnahme mit einer größeren Blendenzahl und somit einer geringeren Öffnungsweite gemacht worden wäre. Die Aufnahme mit einer Gesamtzahl von 3456 mal 4608 Bildpunkten (16 Megapixel) ist bei einer Blendenzahl von 2,2 aufgenommen worden, wo der Durchmesser des Beugungsscheibchen mit 3 Mikrometern kleiner war als der Punktabstand auf dem Bildsensor von 3,76 Mikrometern.
Die folgende Tabelle gibt für eine mittlere Wellenlänge von 550 Nanometern die Durchmesser der Beugungsscheibchen an (sowohl auf dem Bildsensor in Mikrometern als auch im digitalen Bild in Bildpunkten), die bei verschiedenen Blendenzahlen resultieren, und in den beigefügten Bildern wurde die Auswirkung der Beugungsbegrenzung durch Gaußsche Weichzeichnung simuliert. In der rechten Spalte sind die Leistungsdichtespektren der Bilder zur Verdeutlichung der Modulationen in Abhängigkeit von den Ortsfrequenzen dargestellt. In der Mitte der Modulationsübertragungsdiagramme liegt jeweils die Ortsfrequenz null, und in den Mitten der vier Diagrammkanten beträgt die Ortsfrequenz jeweils 128 Linienpaare pro Bildausschnittshöhe. Der Bildausschnitt auf dem Bildsensor war geringfügig kleiner als ein Quadratmillimeter, und dies entspricht daher einer Ortsfrequenz von 133 Linienpaaren pro Millimeter (Lp/mm) auf dem Bildsensor beziehungsweise von 2304 Linienpaaren pro Bildhöhe (Lp/Bh) in der Originalaufnahme.
Der Strukturanteil gibt den prozentualen Anteil der in den Leistungsdichtespektren der Modulationsübertragungsdiagramme effektiv auftretenden Ortsfrequenzen an. Die maximalen effektiv auftretenden Ortsfrequenzen liegen weit unterhalb der durch die Bildauflösung vorgegebenen maximal möglichen Ortsfrequenz von 133 Lp/mm beziehungsweise von 2304 Lp/Bh (siehe auch Abschnitt Ortsfrequenz).
Das Originalbild mit einer maximal effektiv auftretenden Ortsfrequenz von 82 Lp/mm beziehungsweise von 1420 Lp/Bh kann folglich bei sehr geringem Informationsverlust auch in einem digitalen Bild mit einer Bildauflösung von nur sechs Megapixel gespeichert werden, bei einer entsprechenden Aufnahme bei der Blendenzahl 32 mit einer maximal effektiv auftretenden Ortsfrequenz von 23 Lp/mm respektive von 400 Lp/Bh wäre die für die Informationsübertragung maximal erforderliche Bildauflösung sogar nur ein halbes Megapixel:
| Blendenzahl |
auf dem Bildsensor |
in der digitalen Aufnahme |
Digitale Aufnahme | Strukturanteil | Maximal effektiv auftretende Ortsfrequenz |
Modulationsübertragungsdiagramm |
|---|---|---|---|---|---|---|
| 2,2 | 3,0 µm | 0,8 Bildpunkte |  |
16% | 82 Lp/mm 1420 Lp/Bh |

|
| 4,0 | 5,4 µm | 1,5 Bildpunkte |  |
15% | 77 Lp/mm 1330 Lp/Bh |

|
| 8,0 | 11 µm | 2,9 Bildpunkte |  |
13% | 67 Lp/mm 1160 Lp/Bh |

|
| 16 | 21 µm | 5,8 Bildpunkte |  |
8% | 41 Lp/mm 710 Lp/Bh |

|
| 32 | 43 µm | 12 Bildpunkte |  |
4% | 23 Lp/mm 400 Lp/Bh |

|
Da im optischen Bild keine Strukturen auftreten, die kleiner sind als die Beugungsscheibchen, kann die Kenntnis der Durchmesser der Beugungsscheibchen ausgenutzt werden. So können zum Beispiel ohne weiteres Annahmen über die maximal auftretende Ortsfrequenz des Bildrauschens oder über die maximale Steilheit von Kanten gemacht werden, die zur rechnerischen Verbesserung von digitalen Bilddaten eingesetzt werden können.
Beugungseffekte bei hellen Lichtquellen
Bearbeiten
Wenn eine helle nahezu punktförmige Lichtquelle abgebildet wird, kommt es an allen Blenden im Strahlengang zu einer in der Abbildung mehr oder weniger stark wahrnehmbaren Beugung. Kreisförmige Blenden erzeugen hierbei kreisförmige Beugungsscheibchen.
Viele Objektive sind mit verstellbaren Irisblenden ausgestattet, die aus mehreren gleichartigen Lamellen bestehen. Je weiter solche Objektive abgeblendet werden, desto stärker nähert sich die Blendenform einem Polygon an, das genauso viele Kanten beziehungsweise Ecken hat, wie es Blendenlamellen gibt. Die dann zunehmend geradlinig werdenden Kanten der Irisblende erzeugen senkrecht zu den jeweiligen Kanten rechts und links kleine Beugungsstriche, die sich in der Abbildung zu einem Strahlenkranz überlagern. Wenn die Anzahl der Blendenlamellen wie üblich ungerade ist, entstehen doppelt so viele Strahlen wie es Blendenlamellen gibt, ansonsten sind es genauso viele, da die Beugungsstriche der gegenüberliegenden Blendenkanten dann deckungsgleich sind.
Im folgenden Bild ist die optische Abbildung des Planeten Venus am Nachthimmel mit einem auf die Blendenzahl 4 abgeblendeten Objektiv mit 9 Blendenlamellen und somit 18 radial von der Venus weggehenden Strahlen zu sehen:

Güte der optischen Abbildung
Bearbeiten
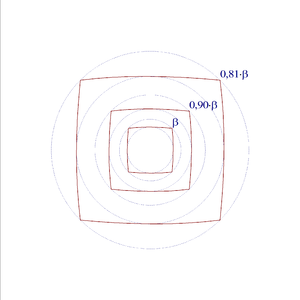
kissenförmige Verzeichnung, Vignettierung und Farbquerfehler. Die beiden konzentrischen weißen Rechtecke symbolisieren zwei verschieden große, zentrale Bildausschnitte innerhalb des Bildkreises des Objektivs, bei denen diese Abbildungsfehler unterschiedlich stark ausgeprägt sind. Alle Abbildungsfehler sind üblicherweise am Bildkreisrand größer als in der Bildmitte. Die optische Auflösung ist bei der Verwendung desselben Objektivs beim kleinen Bildausschnitt im Vergleich zum großen Bildausschnitt in Bezug auf die genutzte Bildgröße ebenfalls entsprechend geringer.
Die Kontrastübertragung einer optischen Abbildung wird stets, mit zunehmenden Ortsfrequenzen zunehmend stark durch Beugung an Kanten begrenzt (siehe oben). Da alle optischen System über Kanten verfügen, wie zum Beispiel Blendenöffnungen oder Einfassungen, kann diese Beschränkung durch geeignete Maßnahmen zwar verringert, aber nie vollständig ausgeschaltet werden.
Ferner können auch gerichtete oder diffuse Reflexionen innerhalb des abbildenden Systems die Kontrastübertragung vermindern, da sie in dunklen Bildbereichen Falschlicht hervorrufen.
Siehe hierzu auch: Modulationsübertragung
Häufig kommen andere Abbildungsfehler deutlich stärker zum Tragen, von denen einige im Folgenden erläutert werden. Sie betreffen nicht unmittelbar die Kontrastübertragung einer optischen Abbildung, sondern werden durch Abschattungen oder durch geometrische Verzerrungen verursacht.
In der Regel ist die optische Güte in der Bildmitte (also auf der optischen Achse bei der Bildhöhe null) am größten und nimmt zum Bildrand (also mit wachsender Bildhöhe) immer mehr ab.
Randlichtabfall
Bearbeiten
Ebenso unvermeidlich ist der natürliche Randlichtabfall, der in optischen Systemen durch die geometrische Projektion in verschiedene Winkel zustande kommt. Der Lichtstrom von einer lichtemittierenden Fläche durch eine begrenzende kreisrunde Referenzfläche auf einer Projektionsfläche reduziert sich hierbei in Bezug auf den Lichtstrom entlang der optischen Achse in Abhängigkeit vom betrachteten Winkel zur optischen Achse wie folgt:




Für die effektive Beleuchtungsstärke in einer optischen Projektion unter verschiedenen Winkeln zur optischen Achse in Bezug auf die Beleuchtungsstärke in der Projektion auf der optischen Achse ergibt sich analog:



Die korrigierte Helligkeit in einem Bildpunkt beim Ortsvektor ergibt sich dann aus der dazugehörigen gemessenen Helligkeit zu:




Siehe auch Bildkoordinaten.
Die Kompensation des Randlichtabfalls kann direkt nach der Aufnahme und vor dem Speichern der Bilddaten von der Firmware einer Kamera durchgeführt werden. Wenn die Information in den Metadaten eines digitalen Bildes gespeichert wurde oder aus anderen Quellen beschafft werden kann, kann die Kompensation auch nachträglich mit Hilfe einer geeigneten Bildbearbeitungssoftware berechnet werden.
Vignettierung
Bearbeiten
Kommen im Strahlengang mehrere abschattende Blenden oder Einfassungen zum Tragen, verstärkt sich der Helligkeitsabfall in den Bildecken über das Maß des Randlichtabfalls hinaus. Dies wird Vignettierung genannt und kann dazu führen, dass in den Bildecken praktisch kaum noch ein Bildsignal ausgewertet werden kann.
Wird die tatsächlich genutzte Bildkreis einer optischen Abbildung auf einen hinreichend kleinen Bildsensor reduziert, wird der Helligkeitsverlust am Bildrand geringer.
Siehe hierzu auch: Zweidimensionale Bildsensoren
Auch die Vignettierung kann rechnerisch korrigiert werden, wenn die entsprechenden Bildparameter während der Aufnahme und die Objektiveigenschaften bekannt sind.
Sphärische Aberration
Bearbeiten
Der Öffnungsfehler (sphärische Aberration) hängt von der maximalen Einfallshöhe der Strahlen ab, die zu einer optischen Abbildung beitragen. Von einem Objektipukt ausgehende Strahlen mit großer Einfallshöhe erzeugen aufgrund des Öffnungsfehlers in der Bildebene keinen geometrischen Bildpunkt, sondern einen Zerstreuungskreis und begrenzen somit die erzielbare optische Auflösung.
Die Einfallshöhe kann hierbei maximal halb so groß werden, wie die Öffnungsweite des verwendeten Objektivs. Der Öffnungsfehler kann mit einer Aperturblende durch Abblenden auf paraxiale Strahlen - also Strahlen mit geringer Einfallshöhe - reduziert, oder durch den Einsatz von asphärischen Linsen korrigiert werden, so dass auch Strahlen mit großer Einfallshöhe bei der Ablenkung keine Schnittweitenverkürzung erfahren.

Mit zunehmender Einfallshöhe H nimmt bei sphärischen Linsen die von der Hauptebene gemessene Schnittweite immer weiter ab, einfallende Strahlen mit großen Einfallshöhen können innerhalb der Linse sogar totalreflektiert werden und tragen dann gar nicht mehr zur optischen Abbildung bei. Nur parallel zur optischen Achse einfallende, achsnahe Strahlen schneiden die optische Achse in die Nähe des Brennpunktes. Bei asphärischen Linsen ergibt sich im Idealfall für alle Einfallshöhen dieselbe von der Hauptebene gemessene Schnittweite, und alle gebrochenen Strahlen schneiden die optische Achse im Brennpunkt F.
Berechnung an plankonvexer Linse
Bearbeiten






Anhand einer plankonvexen Linse kann die Form der entsprechenden asphärischen Oberfläche verhältnismäßig leicht veranschaulicht werden. Betrachtet man eine optische Abbildung aus dem Unendlichen mit parallelem, monochromatischem Licht durch eine solche Linse mit dem Krümmungsradius bei der Einfallshöhe , ergibt sich die in nebenstehender Abbildung dargestellte Situation.

Zur Berechnung der asphärischen Oberfläche können Lichtstrahlen betrachtet werden, die mit der Einfallshöhe parallel zur optischen Achse auf die objektseitige, plane Linsenfläche fallen. Diese werden beim Eintritt in das optisch dichtere Medium des Linsenmaterials mit dem Brechungsindex nicht gebrochen, da sie senkrecht auftreffen. Bildseitig bilden diese Strahlen zum Oberflächenlot der Linse in der Linse den Winkel und außerhalb der Linse den Winkel . Diese Winkel verhalten sich wie durch das Snelliussche Brechungsgesetz beschrieben. Dabei gelten die folgenden Beziehungen:



Die optische Achse schneiden diese Strahlen dann unter dem Winkel

Für paraxiale Strahlen (also für ) ergibt sich eine bildseitige Schnittweite respektive Brennweite von:


- ,

wobei der Radius im Scheitel der Linse auf der optischen Achse ist.

Die Pfeilhöhe , gemessen von der Hauptebene der Linse, kann dann in Abhängigkeit von der Einfallshöhe mit Hilfe einiger Hilfsgrößen ausgehend von und in Schritten von iterativ ermittelt werden:









Für die Schnittweite vom Scheitelpunkt der Kugel mit dem Radius auf der optischen Achse gilt:



Schließlich ergibt sich der Scheitelabstand von der Hauptebene aus der Differenz dieser Schnittweite mit der Schnittweite bei paraxialen Strahlen :


Beispiel

In der folgenden Tabelle sind einige auf diese Weise berechnete Beispielwerte für , und den einheitenlosen Längenmaßen und angegeben. Mit zunehmender Einfallshöhe werden die Krümmungsradien immer größer und sowohl die Mittelpunkte als auch Scheitelpunkte der entsprechenden Kreise entfernen sich objektseitig immer weiter von der Hauptebene.


| Einfallshöhe |
Pfeilhöhe |
Radius |
Scheitel- abstand |
Winkel in ° |
Winkel in ° |
Winkel in ° |
|---|---|---|---|---|---|---|
| 0 | 0,0 | 100,0 | 0,0 | 0,0 | 0,0 | 0,0 |
| 10 | 0,5 | 101,1 | 0,0 | 5,7 | 8,5 | 2,9 |
| 20 | 2,0 | 104,4 | 0,1 | 11,0 | 16,7 | 5,7 |
| 30 | 4,5 | 109,7 | 0,3 | 15,9 | 24,2 | 8,3 |
| 40 | 7,8 | 116,7 | 0,8 | 20,0 | 30,9 | 10,9 |
| 50 | 12,0 | 125,2 | 1,6 | 23,5 | 36,8 | 13,3 |
| 60 | 16,9 | 134,8 | 2,8 | 26,4 | 41,9 | 15,5 |
| 70 | 22,4 | 145,3 | 4,5 | 28,8 | 46,3 | 17,5 |
| 80 | 28,5 | 156,6 | 6,5 | 30,7 | 50,0 | 19,3 |
| 90 | 34,9 | 168,5 | 8,9 | 32,3 | 53,2 | 21,0 |
| 100 | 41,8 | 180,8 | 11,6 | 33,6 | 56,0 | 22,5 |
| 110 | 48,9 | 193,6 | 14,6 | 34,6 | 58,5 | 23,8 |
| 120 | 56,3 | 206,6 | 17,9 | 35,5 | 60,6 | 25,1 |
| 130 | 63,9 | 219,9 | 21,4 | 36,2 | 62,5 | 26,2 |
| 140 | 71,7 | 233,4 | 25,0 | 36,9 | 64,1 | 27,3 |
| 150 | 79,6 | 247,1 | 28,9 | 37,4 | 65,6 | 28,2 |
| 160 | 87,7 | 260,9 | 32,9 | 37,8 | 66,9 | 29,1 |
| 170 | 95,8 | 274,9 | 37,0 | 38,2 | 68,1 | 29,9 |
| 180 | 104,1 | 288,9 | 41,2 | 38,5 | 69,2 | 30,6 |
| 190 | 112,4 | 303,0 | 45,5 | 38,8 | 70,1 | 31,3 |
| 200 | 120,9 | 317,3 | 49,9 | 39,1 | 71,0 | 31,9 |

Bis zu einer Einfallshöhe von 140 entspricht die konvexe Oberfläche dieser Linse nach DIN ISO 10110-12 ohne weitere asphärische Parameter in den höheren Gliedern relativ genau der Beziehung für einen Hyperboloiden mit der konischen Konstante :


Verzeichnung
BearbeitenVerzeichnung kommt zustande, wenn sich der Abbildungsmaßstab für verschiedene Bildhöhen (also für verschiedene Abstände der Bildpunkte von der optischen Achse) ändert. Mit korrigierten Objektiven oder mit telezentrischen Objektiven lassen sich solche Abweichungen vermeiden, und wenn der Abbildungsmaßstab über das gesamte Bildfeld konstant ist, wird eine solche Abbildung verzeichnungsfrei genannt.
Siehe hierzu auch: Abbildungsmaßstab und Telezentrie
Bei einfachen Objektivkonstruktionen nimmt der Betrag der Verzeichnung mit zunehmender Bildhöhe typischerweise monoton und stetig zu:
- Verzeichnung von quadratischen Objekten bei optischen Abbildungen
-
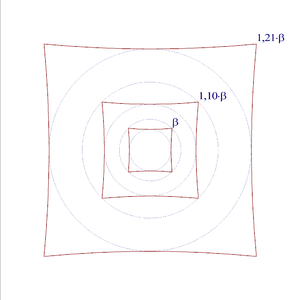 Kissenförmig verzeichnete Abbildung mit nach außen hin zunehmendem Abbildungsmaßstab
Kissenförmig verzeichnete Abbildung mit nach außen hin zunehmendem Abbildungsmaßstab -
 Verzeichnungsfreie Abbildung mit konstantem Abbildungsmaßstab
Verzeichnungsfreie Abbildung mit konstantem Abbildungsmaßstab -
 Tonnenförmig verzeichnete Abbildung mit nach außen hin abnehmendem Abbildungsmaßstab
Tonnenförmig verzeichnete Abbildung mit nach außen hin abnehmendem Abbildungsmaßstab



Nimmt der Abbildungsmaßstab mit zunehmender Bildhöhe kontinuierlich zu, wird von einer kissenförmigen Verzeichnung oder Kissenverzeichnung gesprochen, nimmt er kontinuierlich ab, wird von einer tonnenförmigen Verzeichnung oder Tonnenverzeichnung gesprochen.
Verzeichnung tritt bei Linsen und unkorrigierten Objektiven mit sphärischer Aberration auf, wenn die abbildenden Strahlenbündel vor oder hinter den Hauptebenen durch Blenden eingeengt werden. Dabei ist es nicht wesentlich, wie groß oder wie klein diese Blende ist. Liegt die das Strahlenbündel einengende Blende vor der Hauptebene, kommt es zu einer Tonnenverzeichnung, liegt eine solche Blende hinter der Hauptebene, kommt es zu einer Kissenverzeichnung:
- Zur Verzeichnung bei optischen Abbildungen in der Bildebene B
-
 Kissenförmig verzeichnete Abbildung mit nach außen hin zunehmendem Abbildungsmaßstab (dunkelblau), da die Hauptstrahlen mit konstantem Abbildungsmaßstab (blau) von der Blende hinter der Hauptebene H ausgeblendet werden.
Kissenförmig verzeichnete Abbildung mit nach außen hin zunehmendem Abbildungsmaßstab (dunkelblau), da die Hauptstrahlen mit konstantem Abbildungsmaßstab (blau) von der Blende hinter der Hauptebene H ausgeblendet werden. -
 Tonnenförmig verzeichnete Abbildung mit nach außen hin abnehmendem Abbildungsmaßstab (dunkelblau), da die Hauptstrahlen mit konstantem Abbildungsmaßstab (blau) von der Blende vor der Hauptebene H ausgeblendet werden.
Tonnenförmig verzeichnete Abbildung mit nach außen hin abnehmendem Abbildungsmaßstab (dunkelblau), da die Hauptstrahlen mit konstantem Abbildungsmaßstab (blau) von der Blende vor der Hauptebene H ausgeblendet werden.



Die optische Achse markiert in einer Abbildung das Verzeichnungszentrum. Rechnerisch kann die Verzeichnung mit der Aufnahme von zwei parallelen Geraden bestimmt werden. Die eine Gerade liegt hierbei in der Regel senkrecht zur optischen Achse und hat in diesem Punkt die Objekthöhe null. Diese Gerade erscheint im Bild ebenfalls als Gerade mit der Bildhöhe null. Der Abstand zur zweiten Geraden entspricht der Bildhöhe, bei der die Verzeichnung bestimmt wird. Diese Gerade wird bei vorhandener Verzeichnung jedoch nicht als Gerade abgebildet sondern gebogen.
Traditionell wird die Verzeichnung häufig in Prozent angegeben. Hierzu wird häufig ein einfacher Standard der Europäischen Rundfunkunion (European Broadcasting Union (EBU)) verwendet, der sie als das Verhältnis der Differenz zweier Höhen im Bild (in der Skizze gilt hierfür ) zu der von der optischen Achse gemessenen Höhe bestimmt:





Dieses Vorgehen erfordert jedoch eine große Sorgfalt mit Blick auf die Symmetrie der Abbildung, da bei nicht hinreichend genauer Zentrierung der Objektive oder des Messaufbaus in verschiedenen Bildbereichen mit gleicher Bildhöhe verschiedene Werte für die Verzeichnung ermittelt werden.
Nach einem Industriestandard der Standard Mobile Imaging Architecture (SMIA) wird die Verzeichnung durch den Mittelwert zweier Höhen und , die auf gegenüberliegenden Seiten der optischen Achse liegen, wie folgt auf die Höhe durch die optische Achse in der Bildmitte bezogen:




Wenn alle Differenzen , wie bei der Betrachtung der Verzeichnung nach der EBU gleich groß sind, gilt:

Die Verzeichnung kann auf diese Weise natürlich auch in horizontaler Richtung oder für jeden anderen Azimutwinkel bestimmt werden.
Es gibt weitere Varianten zur Bestimmung, bei denen wie in der ISO 9039-2008 bei maximaler Bildhöhe vier Werte in den Bildecken gemessen und gemittelt werden und mit der bei halber Bildhöhe ermittelten Verzeichnung ins Verhältnis gesetzt werden. Dies führt zum Beispiel bei vielen modernen Zoom-Objektiven allerdings dazu, dass dieses Verhältnis unendlich werden kann. In einer optischen Abbildung über mehrere Hauptebenen können nämlich auch gleichzeitig kissenförmige und tonnenförmige Verzeichnungen auftreten. Solche Objektive sind dann nicht notwendigerweise auf der optischen Achse, sondern bei einer Bildhöhe im mittleren Bildfeldbereich - möglicherweise also auch genau bei halber Bildhöhe - verzeichnungsfrei.
Verzeichnung kann mit geometrischen Transformationen mit variablem Maßstab rechnerisch kompensiert werden, wenn die entsprechenden Bildparameter während der Aufnahme und die Objektiveigenschaften bekannt sind. Im Idealfall ist ein in der Bildebene senkrecht zur optischen Achse liegender Bildvektor mit dem Ursprung auf der optischen Achse mit dem konstanten Abbildungsmaßstab proportional zum in der Objektebene senkrecht zur optischen Achse liegenden Objektvektor , der seinen Ursprung ebenfalls auf der optischen Achse hat.



Die zur Kompensation der Verzeichnung transformierten Bildvektoren eines Punktes im Bild ergeben sich dann aus gemessenen Bildvektoren eines Bildpunkts wie folgt, wobei der einheitenlose Faktor nicht konstant ist, sondern in der Regel eine Funktion der Bildhöhe ist:




Siehe auch Bildkoordinaten.
Der von der Bildhöhe abhängige effektive Abbildungsmaßstab beträgt somit:


Für die verzeichnungsfreie Bildhöhe gilt dann:


und somit

Eine solche Transformation kann gegebenenfalls von der Firmware einer Kamera oder später mit Hilfe einer geeigneten Bildbearbeitungssoftware durchgeführt werden. Nach der Transformation sind die Bildkanten nicht mehr gerade und werden daher üblicherweise so beschnitten, so dass wieder ein rechteckiger Bildausschnitt entsteht und somit Bildinformation verloren geht: bei kissenförmiger Verzeichnung in den Bildecken oder bei tonnenförmiger Verzeichnung an den Bildkanten.
Bildfeldwölbung
Bearbeiten
Eine weitere häufig Folge der sphärischen Aberration ist die Bildfeldwölbung. Hierbei liegen die Bildpunkte nicht in einer Ebene, die senkrecht zur optischen Achse steht, sondern auf einer gekrümmten, rotationssymmetrischen Fläche, die die ideale Bildebene auf der optischen Achse berührt.
In der Regel ist die Schnittweite hinter der Hauptebene einer sammelnden Optik hierbei umso kürzer, je größer die Bildhöhe ist. Ein auf der optischen Achse scharfgestelltes Bild eines Objekts mit konstanter Objektweite wird bei einer ebenen Bildfläche zu den Rändern hin durch die wachsenden Zerstreuungskreisdurchmesser der Bildpunktstrahlen also zunehmend unschärfer abgebildet. In diesen Fällen wir oft bei halber Bildhöhe scharfgestellt, da die Bildpunkte auf der optischen Achse und an den Bildrändern dann weniger unscharf sind, als die Bildpunkte am Rand, wenn auf die Bildmitte scharfgestellt wird.
Wird die Projektionsfläche entsprechend der Bildfeldwölbung angepasst, können alle Bildpunkte geometrisch scharf abgebildet werden. Daher gibt es spezielle Bildsensoren, die entsprechend gestaltet sind.
Kritische Blende
BearbeitenWenn die Bildschärfe optimiert werden soll, ist am Objektiv die kritische Blende einzustellen, bei der die Schärfe weder durch die Beugung an der Blende (also bei möglichst großer Öffnungsweite) noch durch den Öffnungsfehler (also bei möglichst kleiner Öffnungsweite) zu stark eingeschränkt wird. Sammelnde Objektivlinsen haben in der Regel eine geringere sphärische Aberration, wenn die Oberfläche mit der schwächeren Krümmung bildseitig angeordnet wird.
Berechnung an plankonvexer Linse
Bearbeiten
Anhand einer plankonvexen, sphärischen Linse kann die kritische Blende verhältnismäßig leicht veranschaulicht werden. Betrachtet man eine optische Abbildung aus dem Unendlichen mit parallelem, monochromatischem Licht der Wellenlänge durch eine solche Linse mit dem Krümmungsradius und der Brennweite , ergibt sich die in nebenstehender Abbildung dargestellte Situation.
Durch Beugung ergibt sich in der Bildebene ein Beugungsscheibchen mit dem Durchmesser
- ,

wobei die Eintrittspupille der optischen Abbildung und die Blendenzahl sind. Die Größe des Beugungsscheibchens ist also proportional zur Blendenzahl.

Zur Berechnung der sphärischen Aberration können Lichtstrahlen betrachtet werden, die mit der Einfallshöhe

parallel zur optischen Achse auf die objektseitige, plane Linsenfläche fallen. Diese werden beim Eintritt in das optisch dichtere Medium des Linsenmaterials mit dem Brechungsindex nicht gebrochen, da sie senkrecht auftreffen. Bildseitig bilden diese Strahlen zum Oberflächenlot der Linse in der Linse den Winkel und außerhalb der Linse den Winkel und werden entsprechend dem Snelliusschen Brechungsgesetz gebrochen. Dabei gilt:


und


Die optische Achse schneiden diese Strahlen dann unter dem Winkel . Die bildseitige Schnittweite , gemessen vom Scheitelpunkt der Linse, ergibt sich dann in Abhängigkeit von der Einfallshöhe mit Hilfe des Sinussatzes zu:


Für paraxiale Strahlen (also für ) vereinfacht sich diese Beziehung durch die Bildung des Grenzwertes zu:
- respektive ,


wobei die Brennweite und die Schnittweite der Linse bei paraxialen Strahlen (also bei ) dann identisch sind.

Aus der Bedingung für die Totalreflexion innerhalb der Linse (das Argument vom Arkussinus des Winkels darf nicht größer als eins werden) ergibt sich die minimal mögliche Blendenzahl :


Im Folgenden wird mit dieser Zusammenfassung weitergerechnet:



Unter Verwendung der Blendenzahl und der Brennweite ergibt sich die Schnittweite zu:

Durch die sphärische Aberration verschiebt sich der Schnittpunkt der hinter der Linse gebrochenen Strahlen mit der optischen Achse umso näher an die Linse, je größer die Einfallshöhe ist. In der Brennebene im Abstand vom Scheitelpunkt der Linse ergibt sich daher keine punktförmige Abbildung mehr, sondern ein Zerstreuungskreis mit dem Durchmesser :

An dieser Stelle sei explizit darauf hingewiesen, dass diese Betrachtungen nur für optische Abbildungen direkt auf der optischen Achse gültig sind. Sobald Objektpunkte von Gegenständen, die sich nicht auf der optischen Achse befinden, abgebildet werden, ergeben sich bei der hier betrachteten plankonvexen Linsengeometrie starke Abbildungsfehler.
Näherung
BearbeitenMit den Näherungen für hinreichend kleine im Bogenmaß


ergibt sich die folgende Näherungsgleichung für den von der Blendenzahl abhängigen Zerstreuungskreisdurchmesser :


Eine für kleine Blendenzahlen weniger genaue Näherung kann mit einer Reihenentwicklung für den Arkussinus bestimmt werden:


Damit vereinfacht sich die Gleichung für den Zerstreuungskreisdurchmesser folgendermaßen:

Bei gegebener Brennweite beziehungsweise bei gegebenem Radius und gegebener Brechzahl der plankonvexen Linse wächst der Zerstreuungskreisdurchmesser also mit dem Kehrwert der dritten Potenz der Blendenzahl .
Beispiel
Bearbeiten
Bei einer Wellenlänge im Grünen von 550 Nanometern ergibt sich der Durchmesser des Beugungsscheibchens (Airy-Scheibchen) in Abhängigkeit von der Blendenzahl zu:

Der Durchmesser des Beugungsscheibchens ist also proportional zur Blendenzahl.
Der Durchmesser des Zerstreuungskreises wird mit zunehmender Blendenzahl jedoch kleiner und dies sogar überproportional (und zwar in Näherung und insbesondere für zunehmende Blendenzahlen mit der dritten Potenz des Kehrwerts (siehe oben unter "Näherung")). Der Betrag der Steigung nimmt in der in der vertikalen Koordinatenachse logarithmischen graphischen Darstellung (siehe rechts) demzufolge kontinuierlich ab, wobei sich die Funktion für große k asymptotisch der horizontalen Achse nähert.
Bei einem Brechungsindex und einem Krümmungsradius von 100 Millimetern ergibt sich also eine Brennweite von 200 Millimetern. Die kleinste Grenze für die Blendenzahl wäre hier . Die Näherung für den Zerstreuungskreisdurchmesser ergibt sich bei diesen Werten zu:



Für verschiedene größere Blendenzahlen ergeben sich dann die in der folgenden Tabelle angegebenen Eintrittspupillen und die Durchmesser für das Beugungsscheibchen und für den Zerstreuungskreis:
| Blendenzahl |
Eintrittspupille in mm |
Winkel in ° |
Winkel in ° |
Durchmesser Beugungsscheibchen in µm |
Durchmesser Zerstreuungskreis in µm |
|---|---|---|---|---|---|
| 2,0 | 100,0 | 30,0 | 48,6 | 3 | 43553 |
| 2,8 | 70,7 | 20,7 | 32,0 | 4 | 11970 |
| 4,0 | 50,0 | 14,5 | 22,0 | 5 | 3835 |
| 5,7 | 35,4 | 10,2 | 15,4 | 8 | 1297 |
| 8,0 | 25,0 | 7,2 | 10,8 | 11 | 449 |
| 11,3 | 17,7 | 5,1 | 7,6 | 15 | 157 |
| 16,0 | 12,5 | 3,6 | 5,4 | 21 | 55 |
| 22,6 | 8,8 | 2,5 | 3,8 | 30 | 19 |
| 32,0 | 6,3 | 1,8 | 2,7 | 43 | 7 |
Das Minimum der Unschärfe liegt nicht notwendigerweise auf dem Schnittpunkt der Funktionen (die Summe der beiden Durchmesser beträgt im Beispiel bei der Blendenzahl 20 etwa 55 Mikrometer). Mit der Annahme, dass die Summe der beiden Durchmesser minimal sein soll, liegt sie Blendenzahl der kritischen Blende bei dieser optischen Abbildung bei Blende 26,7. Die Summe der beiden Durchmesser beträgt hier 47,8 Mikrometer; der Durchmesser des Beugungsscheibchen beträgt dann 36,4 Mikrometer und der des Zerstreuungskreises 11,4 Mikrometer. Die Blendenzahl 26,7 entspricht im oben angegebenen Beispiel einer Blendenöffnung D von 7,5 Millimetern.
Chromatische Aberration
Bearbeiten

Bei der chromatischen Aberration wird unterschieden zwischen dem Farblängsfehler, bei dem sich die Schnittweite mit der Wellenlänge ändert, und dem Farbquerfehler, bei dem sich der Abbildungsmaßstab mit der Wellenlänge ändert. Diese Farbfehler beruhen auf der Dispersion der eingesetzten Gläser, bei der blaues Licht stärker als rotes Licht gebrochen wird.
Diese Fehler können durch die Kombination unterschiedlich brechender und dispergierender Materialien kompensiert werden. Achromaten haben mindestens zwei Linsen und sind für zwei Wellenlängen korrigiert (üblicherweise für lang- und kurzwelliges Licht, also im Roten und im Blauen), bei Apochromaten, die mindestens aus drei Linsen bestehen, ist die Schnittweite sogar bei drei verschiedenen Wellenlängen identisch (üblicherweise für alle drei Primärfarben, also rot, grün und blau). Die hierfür eingesetzten Glassorten unterscheiden sich zum einen im Brechungsindex und zum anderen bei der Abbe-Zahl , die wie folgt definiert ist:


Hierbei stehen die drei Indizes am Brechungsindex für die folgenden Lichtwellenlängen:
- : Brechzahl im Roten bei
- : Brechzahl im Grünen bei
- : Brechzahl im Blauen bei






Kronglas hat typischerweise einen Brechungsindex von 1,5 bis 1,6 und eine Abbe-Zahl, die größer als 50 ist, was einer geringen Dispersion entspricht.
Flintglas hat typischerweise einen Brechungsindex von 1,5 bis 2,0 und eine Abbe-Zahl, die kleiner als 50 ist, was einer starken Dispersion entspricht.
-
 Farblängsfehler durch Dispersion bei einer optischen Abbildung von weißem Licht
Farblängsfehler durch Dispersion bei einer optischen Abbildung von weißem Licht -
 Farbquerfehler bei der optischen Abbildung von weißen, zur optischen Achse zentrierten Kreisen mit verschiedenen Durchmessern
Farbquerfehler bei der optischen Abbildung von weißen, zur optischen Achse zentrierten Kreisen mit verschiedenen Durchmessern


Der Farbquerfehler kann auch rechnerisch kompensiert werden, wenn bei Farbaufnahmen die Teilbilder für die verschiedenen Farbkanäle mit geeigneten Skalierungsfaktoren transformiert werden. Bei einer Farbaufnahme mit den Primärfarben rot, grün und blau (RGB) und den entsprechenden Skalierungsfaktoren , und ergeben sich die korrigierten Ortsvektoren , und zu:







Hierbei gilt üblicherweise:

Siehe auch Bildkoordinaten.
Nach der Transformation sind die Bildkanten nicht mehr deckungsgleich und werden daher üblicherweise auf die Begrenzung der kleinsten Teilfläche beschnitten.
Bei Aufnahmen mit Licht aus einem engen Wellenlängenbereich kann die chromatische Aberration vernachlässigt werden. Dies kann zum Beispiel mit geeigneten monochromatischen Leuchtmitteln, wie Leuchtdioden oder Lasern sowie durch die Verwendung von Interferenzfiltern realisiert werden.
Schärfentiefe
BearbeitenDer Schärfentiefebereich, bei dem Objektpunkte in verschiedenen Objektweiten hinreichend scharf abgebildet werden, wird durch die förderliche Blende realisiert, bei der in der optischen Abbildung alle geometrisch aus dem Objektraum abgebildeten Punkte einen festgelegten, maximalen Zerstreuungskreisdurchmesser nicht überschreiten.

Falls keine absoluten Vorgaben für den maximalen Zerstreuungskreisdurchmesser vorliegen, kann dieser unter der Verwendung der Anzahl der mindestens zu unterscheidenden Bildpunkte auf dem Bildkreisdurchmesser definiert werden:


Falls die optische Abbildung nicht digital oder maschinell weiterverarbeitet, sondern mit der Auflösung des menschlichen Auges betrachtet werden soll, kann die Anzahl der mindestens zu unterscheidenden Bildpunkte auf der Bilddiagonale wie folgt abgeschätzt werden:

Die Schärfentiefe ist eine Funktion des akzeptablen Zerstreuungskreisdurchmessers , der geometrisch scharf eingestellten Objektweite sowie der Brennweite und der Blendenzahl der optischen Abbildung. Sie ergibt sich als Längenmaß aus der Differenz der Fernpunktentfernung und der Nahpunktentfernung , die beide geometrisch als Zerstreuungskreis mit dem Durchmesser abgebildet werden:






Alle Objektpunkte zwischen dem Fernpunkt und dem Nahpunkt werden geometrisch mit Zerstreuungskreisdurchmessern abgebildet, die kleiner sind als der maximalen Zerstreuungskreisdurchmesser .
Hyperfokale Entfernung
Bearbeiten



Zur Bestimmung von Nahpunkt und Fernpunkt kann die hyperfokale Entfernung eingeführt werden. Wird ein entozentrisches Objektiv auf die hyperfokale Entfernung eingestellt, werden alle Objekte zwischen der halben hyperfokalen Entfernung und unendlich hinreichend scharf abgebildet. Hierfür kann anhand der beiden ähnlichen Dreiecke die folgende Beziehung mit der Brennweite , der Objektweite , der Bildweite , der Blendenzahl und dem in der Bildweite auftretenden Zerstreuungskreisdurchmesser aufgestellt werden:

Für die Bildweite gilt nach Umformung sowie entsprechend der Abbildungsgleichung:

Diese Beziehung kann nun nach der Objektweite aufgelöst werden:




Die hyperfokale Entfernung berechnet sich aus der Brennweite , der Blendenzahl und dem in der Bildebene festzulegenden maximalen Zerstreuungskreisdurchmesser wie folgt:


Liegt ein Objektpunkt in einer Objektweite zwischen der halben hyperfokalen Entfernung und dem Unendlichen, wird dieser in der Bildebene also mit einem Zerstreuungskreisdurchmesser abgebildet, der kleiner als ist:


Die Schärfentiefe ist in diesem Fall wegen der unendlichen Fernpunktentfernung ebenfalls unendlich.
Viele Kameras sind mit entsprechenden Fixfokusobjektiven ausgestattet, die keine Veränderung der Scharfstellung erlauben.
Nahpunkt
BearbeitenDie Nahpunktentfernung beschreibt die Objektweite, bei der nahe Objekte noch hinreichend scharf abgebildet werden, wenn das Objektiv auf die Objektweite eingestellt ist:

Wird die Objektweite für ein abbildendes System auf die hyperfokale Entfernung eingestellt, ergibt sich für den Nahpunkt also exakt:

Wird die Objektweite für ein abbildendes System auf dessen Brennweite eingestellt, ergibt sich für den Nahpunktentfernung exakt die Brennweite:


Wird die Objektweite für ein abbildendes System auf unendlich eingestellt, ergibt sich für den Nahpunktentfernung die hyperfokale Entfernung minus der Brennweite:

Da die hyperfokale Entfernung in der Regel wegen der Erfüllung der Bedingung deutlich größer ist als die Brennweite, gilt näherungsweise:


Fernpunkt
BearbeitenDie Fernpunktentfernung beschreibt die Objektweite, bei der ferne Objekte noch hinreichend scharf abgebildet werden, wenn das Objektiv auf die Objektweite eingestellt ist:

Wird die Objektweite für ein abbildendes System auf die hyperfokale Entfernung oder noch größere Entfernungen eingestellt, ergibt sich für die Fernpunktentfernung also:

Wird die Objektweite für ein abbildendes System auf dessen Brennweite eingestellt, ergibt sich für die Fernpunktentfernung der gleiche Wert wie für die Nahpunktentfernung, und die Schärfentiefe ist somit null:

Schärfentiefebereich
BearbeitenMit der Hilfsgröße
- mit beziehungsweise



ergibt sich aus der Differenz von Fernpunktentfernung und Nahpunktentfernung die Schärfentiefe wie folgt:




In der Praxis kann häufig die folgende Annahme gemacht werden:
- beziehungsweise


Unter dieser Voraussetzung vereinfachen sich die Bestimmung der Schärfentiefe und der Hilfsgröße :

- beziehungsweise


Bei vorgegebener Schärfentiefe kann für eine bestimmte Objektweite die Hilfsgröße durch Lösen der entsprechenden quadratischen Gleichung bestimmt werden:


Wenn die Brennweite ebenfalls vorgegeben ist, kann hieraus unmittelbar die dazugehörige maximale hyperfokale Entfernung berechnet werden:


Wenn der maximale Zerstreuungskreisdurchmesser festgelegt ist und diese Gleichung mit der Definitionsgleichung für die hyperfokale Entfernung (siehe oben) gleichgesetzt wird, ergibt sich für die minimale Blendenzahl schließlich:

Mit der oben genannten, für die meisten praktischen Fälle geltenden Einschränkung kann die minimale Blendenzahl gut wie folgt abgeschätzt werden:

Unter Verwendung des Abbildungsmaßstabs vereinfacht sich diese Gleichung zu:


Somit kann unter den genannten Voraussetzungen bei vorgegebener Blendenzahl auch die Schärfentiefe relativ einfach abgeschätzt werden:

Für größere Objektweiten mit und mit der Öffnungsweite des Objektivs vereinfacht sich diese Abschätzung weiter zu:



Bei vorgegebenem Bildwinkel ist der Quotient aus Bilddiagonale und Brennweite konstant. Sind ferner die Öffnungsweite und die Anzahl der auf der Bilddiagonalen aufzulösenden Bildpunkte gegeben, hängt die Schärfentiefe ausschließlich vom Quadrat der Objektweite ab. Bei doppelter Objektweite vergrößert sich die Schärfentiefe also ungefähr auf das Vierfache und bei halber Objektweite verringert sie sich ungefähr auf ein Viertel.

Erhöhung der Schärfentiefe
BearbeitenWenn eine große Schärfentiefe gewünscht wird, kann zur Reduktion der hyperfokalen Entfernung mit Objektiven mit kleineren Öffnungsweiten beziehungsweise mit abgeblendeten Objektiven oder mit kürzeren Brennweiten gearbeitet werden. Hierbei ist jedoch zu beachten, dass bei großen Blendenzahlen die Beugungsbegrenzung die erreichbare optische Auflösung deutlich einschränken kann.
Alternativ können objektseitig telezentrische Objektive eingesetzt werden, bei denen eine größere Schärfentiefe erreicht wird als bei entozentrischen Objektiven gleicher Brennweite und Öffnungsweite (siehe auch Abschnitt Telezentrie).
Eine weitere Möglichkeit ist der Einsatz von plenoptischen Kameras, die bei der Aufnahme ein Lichtfeld registrieren, aus denen für verschiedene Objektweiten scharfe Bilder berechnet werden können (siehe auch Abschnitt Plenoptische Kameras).
Ferner ist es bei unbewegtem Objekt und unbewegter Kamera möglich, eine Aufnahmereihe mit automatisch variierenden oder manuell variierten Objektweiten zu machen (englisch: focus bracketing). Alternativ kann die Kamera während der Aufnahmereihe mit fest eingestellter Objektweite entlang der optischen Achse verschoben werden. Bei einer anschließenden Bildanalyse können die im jeweiligen Schärfentiefebereich scharf abgebildeten Bildbereiche jeder Aufnahme zu einer einzigen Aufnahme zusammengesetzt werden (englisch: focus stacking). Hierzu können die digitalisierten Bilddaten zweidimensionalen Fourier-Transformationen unterzogen werden, wobei sie aus dem Ortsraum in den Ortsfrequenzraum übertragen werden. Wenn in den einzelnen Bildtransformationen jeweils die spektralen Anteile mit hohen Amplituden bei höheren Ortsfrequenzen berücksichtigt werden, die durch scharf abgebildete Objekte hervorgerufen werden, können diese Ortsfrequenzanteile aus allen Aufnahmen überlagert und mit Hilfe einer inversen Fourier-Transformation zurück in den Ortsraum übertragen werden. Auf diese Weise ergibt sich ein einziges Bild mit einem großen Schärfentiefebereich. Für die Berechnung der Fourier-Transformation wird aus Effizienzgründen häufig eine diskrete Fast-Fourier-Transformation (FFT) angewendet (siehe auch Abschnitt Fourier-Transformation).
Die folgenden sechs Bilder zeigen Aufnahmen mit zunehmend größer werdender Objektweite:

- Fokus-Stacking
-
 1. Aufnahme
1. Aufnahme -
 2. Aufnahme
2. Aufnahme -
 3. Aufnahme
3. Aufnahme -
 4. Aufnahme
4. Aufnahme -
 5. Aufnahme
5. Aufnahme -
 6. Aufnahme
6. Aufnahme






Siehe auch:
- Abschnitt Modulation in Abhängigkeit von der Ortsfrequenz
- Abschnitt Fourier-Transformation
Entfernungseinstellung
BearbeitenViele Kamerasysteme sind mit Fokussierungshilfen ausgestattet, um die Objektive auf die richtige Entfernung einstellen zu können. Für manuelle Fokussierung kann das photographische Bild auf eine Hilfsebene projiziert werden, die zum Beispiel mit einer Einstellscheibe versehen ist, auf der es bei hinreichen großen Bildern direkt in einem Lichtschachtsucher oder bei kleineren Bildern durch einen optischen Sucher mit einem Okular betrachtet werden.
Moderne Systeme erlauben eine Echtzeitwiedergabe der Bilder (Live-View), bei der das Bild, das vom Bildsensor aufgenommen wurde, auf einem Bildschirm oder in einem elektronischen Sucher betrachtet und ohne weiteres auch vergrößert (Software-Lupe) oder mit zusätzlicher Information angereichert werden kann.
Fokus-Peaking
BearbeitenDurch eine entsprechende Analyse der Modulation benachbarter Bildpunkte kann in Echtzeit im gesamten Bild Information über die Bildschärfe gewonnen werden und zum Beispel durch farbig oder in der Helligkeit hervorgehobene Konturen angezeigt werden. Dieses Hilfsmittel wird üblicherweise als Fokus-Peaking bezeichnet.
- Fokus-Peaking
-
 Photographie eines scharf abgebildeten Baumzweigs in einer unscharf abgebildeten Gasse
Photographie eines scharf abgebildeten Baumzweigs in einer unscharf abgebildeten Gasse -
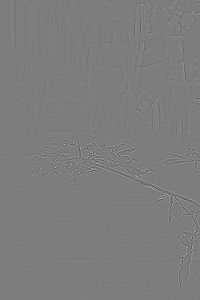 Kanten im Bild nach der Filterung mit einem zweidimensionalen digitalen Hochpassfilter
Kanten im Bild nach der Filterung mit einem zweidimensionalen digitalen Hochpassfilter -
 Tonwerterhöhung und Rotfärbung der Kanten im gefilterten Bild
Tonwerterhöhung und Rotfärbung der Kanten im gefilterten Bild -
 Überlagerung der Photographie mit den ermittelten und überhöhten Kanten
Überlagerung der Photographie mit den ermittelten und überhöhten Kanten




Ein einfaches Verfahren zur Erkennung von Kanten ist die mathematische Faltung der digitalen Bilddaten mit einer kleinen geeigneten Faltungsmatrix, die über die entsprechenden Bildbereiche gerastert wird, wobei benachbarte Helligkeitswerte mit den jeweiligen Elementen der Faltungsmatrix multipliziert werden müssen. Als Hochpass-Operator für eine solche Kantendetektion kann zum Beispiel der Laplace-Operator in Form eines Laplace-Filters eingesetzt werden, der als Ergebnis der Operation ein entsprechendes Kantenbild erzeugt.
Auf dem Kontrollbildschirm werden das originale Bild und das im Kontrast verstärkte und gegebenenfalls farblich hervorgehobene Kantenbild überlagert, um dem Anwender den Bildinhalt und die Information über die Schärfe in den verschiedenen Bildbereichen gleichzeitig anzuzeigen. Hierzu kann zum Beispiel bildpunktweise die maximale Helligkeit in den beiden Bildern ermittelt oder ein geeignetes normiertes Produkt gebildet werden.
Autofokussysteme
BearbeitenFür die automatische Scharfstellung gibt es Autofokussysteme, die die Schärfe mit einem Hilfssensor in einer eigenen Bildebene ermitteln. Dieses Vorgehen wird zunehmend durch die direkte Schärfemessung mit Hilfe der Bildsensors für die Bildaufnahme abgelöst, die inzwischen ebenso schnell und vor allem zuverlässiger und flexibler arbeitet, als die automatische Fokussierung mit Hilfssensoren. Hilfssensoren und Sucherbilder von Einstellscheiben stehen bei Spiegelreflexkameras systembedingt nicht für kontinuierliche Fokussierung bei Videoaufnahmen zur Verfügung.

Wenn ein Objekt in der Objektebene G über die Hauptebene H scharf auf die Bildebene B abgebildet werden soll, kann eine automatische Schärfemessung durchgeführt werden, indem hinter der Bildebene B zwei kleine zusätzliche Sammellinsen (mit der gemeinsamen Hauptebene M) in den Strahlengang gebracht werden. Diese bilden Objekte mit verschiedenen Objektweiten in die Sensorebene S ab, wobei der Abstand der beiden Bildpunkte in der Sensorebene S für unendliche Objektweite c maximal ist und für kleiner werdende Objektweiten immer geringer wird. Der Abstand der beiden Bildpunkte bei korrekter Fokussierung über die Hauptebene H liegt in der graphischen Darstellung oben beim Wert b (Strahlengang magenta).
Kleinere Abstände (a < b) ergeben sich durch geringere Objektweiten (Strahlengang rot), die Schärfe ist in diesem Fall auf eine zu große Objektweite eingestellt. Größere Abstände (c > b) ergeben sich durch größere Objektweiten (Strahlengang zyan), die Schärfe ist in diesem Fall auf eine zu kleine Objektweite eingestellt. Dieses Verfahren hat den Vorteil, dass aus dem Abstand der beiden Bildpunkte sofort abgelesen werden kann, ob die Schärfe für zu kleine Objektweiten (Abstand = c > b) oder für zu große Objektweiten (Abstand = a < b) eingestellt ist, beziehungsweise dass die Schärfe bereits korrekt eingestellt ist (Abstand = b). In der Praxis wird der Abbildungsstrahlengang während der Schärfemessung über Spiegel oder teildurchlässige Spiegel auf eine entsprechende Messeinheit umgelenkt (siehe auch Spiegelreflexsysteme).
Bei einer Kontrastmessung in der Bildebene B kann lediglich festgestellt werden, wie hoch der Kontrastwert ist, nicht jedoch ob dieser bereits ein Maximum erreicht hat, beziehungsweise in welche Richtung die Scharfstellung korrigiert werden muss, um den Kontrast zu erhöhen.
Fokussierungsfehler
Bearbeiten
Sowohl bei der manuellen Fokussierung mit einer Einstellscheibe als auch bei der Benutzung von Hilfssensoren besteht die Gefahr von Fokussierungsfehlern, da die Messebene und die Aufnahmeebene weder exakt den gleichen Abstand von der letzten Hauptebene des Objektivs haben, noch perfekt parallel und perfekt senkrecht zur optischen Achse ausgerichtet werden können. Ursachen können Lagefehler bei der Abbildung mit einem Objektiv, wie zum Beispiel die Bildfeldwölbung, oder Toleranzen und Dejustierungen, sowie bei bewegten Motiven Verzögerungen im automatischen Fokussierungssystem der Kamera sein.
- Fokussierungsfehler
-
 Aufnahme mit Backfokus auf dem vierten Stab
Aufnahme mit Backfokus auf dem vierten Stab -
 Aufnahme mit korrekter Fokussierung auf dem mittleren Stab
Aufnahme mit korrekter Fokussierung auf dem mittleren Stab -
 Aufnahme mit Frontfokus auf dem zweiten Stab
Aufnahme mit Frontfokus auf dem zweiten Stab





Die Stärke des Fokussierungsfehlers kann bei vorgegebener Öffnungsweite über die Größe des Zerstreuungskreises bestimmt werden, der in der Bildebene aufgrund der Differenz zwischen eingestellter und optimaler Bildweite entsteht:

Für eine Abbildung aus dem Unendlichen ist Bildweite identisch mit der Brennweite . Für diesen Fall ergibt sich unter Verwendung der Blendenzahl der maximale durch den Fokussierungsfehler bedingte maximale Zerstreuungskreisdurchmesser zu:


Alternativ kann der maximale Fokussierungsfehler aus der eingestellten Blendenzahl und dem maximal tolerierbaren Zerstreuungskreisdurchmesser ermittelt werden:

Spiegelreflexsysteme
Bearbeiten
Bei Spiegelreflexsystemen wird das Bild des Objektivs der Kamera für die Bildauswahl zunächst über einen Spiegelsystem in auf eine Einstellscheibe und einen Autofokussensor abgebildet. Anhand der Darstellung auf der Einstellscheibe können der Bildausschnitt betrachtet und die Bildschärfe visuell beurteilt werden. Mit einem kalibrierten Autofokussensor kann die eingestellte Objektweite ermittelt werden, um die Entfernungseinstellung des Objektivs gegebenenfalls korrigieren zu können.
Beim Photographieren mit kleiner Blendenzahl und mit kleinen akzeptablen Zerstreuungskreisen auf dem Bildsensor müssen die Ebenen vom Bild, von der Einstellscheibe und vom Autofokussensor über das gesamte Bildfeld auf weniger als 1/100 Millimeter genau positioniert sein, was aufgrund von Fertigungstoleranzen und Temperaturschwankungen in Bezug auf das Kameragehäuse in der Praxis sehr aufwendig und schwierig ist.
Bei hochgeöffneten Objektiven mit kleiner Blendenzahl und entsprechend großen bildseitigen Öffnungswinkeln oder bei unkorrigierten Objektiven mit Bildfeldwölbung sind die tolerierbaren Fokussierungsfehler, also die Abweichungen der Bildweite von den Weiten der Einstellscheibe oder von den Weiten des Autofokussensors also sehr klein und die Kamera kann unter Umständen mechanisch nicht mehr hinreichend präzise und thermisch nicht mehr hinreichend stabil konstruiert und ausgeführt werden. In solchen Fällen wird ein über die Einstellscheibe oder den Autofokussensor in der Schärfe eingestelltes Bild in der Bildebene geometrisch nicht mehr hinreichend scharf abgebildet, und es bietet sich an, die Schärfemessung direkt in der Bildebene, bei digitalen Kameras also mithilfe des Bildsensors durchzuführen.
Auswirkung der Bildgröße auf Abbildungsparameter
BearbeitenDie Bildgröße wird bei Kameras durch das Aufnahmemedium festgelegt, das in der Regel rechteckig begrenzt ist. Wenn sich die optische Achse des Systems in der Mitte des entsprechenden Rechtecks in der Bildebene befindet, ist die Bilddiagonale des aufgenommenen Bildes identisch mit dem genutzten Bildkreisdurchmesser der Abbildung.
In der folgenden Tabelle wird die Auswirkung der Halbierung der Bilddiagonale eines Bildaufnahmesystems dargestellt, die sich bei gleicher Brennweite der optischen Abbildung sowie bei gleicher Öffnung und gleicher Blendenzahl des Objektivs ergeben, wenn die Anzahl der im Bild aufgenommenen Bildpunkte konstant gehalten wird:
| Vergleich von Größen bei optischer Abbildung |
Referenzformat mit gegebener Bilddiagonale, Öffnungsweite und Brennweite |
Halbe Bilddiagonale, gleiche Öffnungsweite, gleiche Brennweite |
Halbe Bilddiagonale, gleiche Öffnungsweite, halbe Brennweite |
Halbe Bilddiagonale, halbe Öffnungsweite, gleiche Brennweite |
Halbe Bilddiagonale, halbe Öffnungsweite, halbe Brennweite |
|---|---|---|---|---|---|
 |
 |
 |
 |
 | |
| Bilddiagonale / Bildkreisdurchmesser |
|||||
| Öffnungsweite | |||||
| Brennweite | |||||
| Blendenzahl | |||||
| Durchmesser des Beugungsscheibchens |
|||||
| Abbildungsmaßstab | |||||
| Bildwinkel | |||||
| Lichtstrom im Objektiv |
|||||
| Beleuchtungsstärke im Bild |
|||||
| Bildseitiger Öffnungswinkel |
|||||
| Bildseitiger Raumwinkel |
|||||
| Lichtstärke im Bild |
|||||
| Leuchtdichte im Bild |
|||||
| Belichtungswert | |||||
| Belichtungszeit | |||||
| Objektivvolumen | |||||
| Bildfläche | |||||
| Normalbrennweite | |||||
| Punktabstand | |||||
| Relativer Fokussierungsfehler |
|||||
| Hyperfokale Entfernung |
|||||
| Schärfentiefe |

















































Bei gleicher Öffnung sowie bei halber Bildgröße und halber Brennweite unterscheidet sich ein Objektiv also vor allem durch die kürzere Bauform und das dadurch geringere Volumen und Gewicht. Insbesondere sind die Schärfentiefe des Bildes und der Bildwinkel sowie der Lichtstrom und damit die Lichtempfindlichkeit pro Bildpunkt identisch. Die Beugungsscheibchen sind zwar nur halb so groß, aber dafür sind auch die Bildpunkte nur halb so groß, so dass sich in der Bildqualität hierdurch kein Unterschied ergibt.
Äquivalente Brennweite
Bearbeiten
Der Bildausschnitt hängt von der Brennweite des Objektivs und der Größe des Bildsensors ab und wird am besten durch den sogenannten Bildwinkel beschrieben. Um den gleichen Bildwinkel und somit die gleiche Bildperspektive zu erhalten, muss eine Kamera mit einem doppelt so großen Bildsensor mit doppelt so großer Brennweite betrieben werden. Der Abbildungsmaßstab unterscheidet sich bei großer Objektweite dann auch um den Faktor zwei, das heißt, dass der äquivalente Abbildungsmaßstab für halb so große Bildsensoren bei halber Brennweite auch nur halb so groß ist.
Die folgende Tabelle zeigt Beispiele für äquivalente Brennweiten mit gleichem Bildwinkel bei verschiedenen Bildsensorklassen:
| Bildsensorklasse | Äquivalente Brennweite bei Weitwinkel in Millimetern |
Äquivalente Brennweite bei Normalwinkel in Millimetern |
Äquivalente Brennweite bei Telewinkel in Millimetern |
|---|---|---|---|
| Miniatur | 4 | 7 | 12 |
| Kompakt | 5 | 9 | 15 |
| 2/3-Zoll | 7 | 13 | 22 |
| 1-Zoll | 10 | 18 | 30 |
| Micro Four Thirds | 14 | 25 | 42 |
| APS-C | 18 | 32 | 55 |
| Vollformat | 28 | 50 | 85 |
| Mittelformat | 39 | 70 | 120 |
| Großformat | 56 | 100 | 170 |
Äquivalente Blendenzahl
Bearbeiten

Anmerkung: Der Weg zur Scharfstellung im Bildraum von unendlicher Objektweite auf die endliche Objektweite a wird mit größer werdender Brennweite und entsprechend größerem Bild überproportional länger (Δa' versus 4,5 Δa').
Die Schärfentiefe und die Beugungsunschärfe hängen von der Brennweite des Objektivs und der eingestellten Blendenzahl respektive von der Öffnungsweite ab. Um bei gleichem Bildwinkel - also bei äquivalenter Brennweite - die gleiche Schärfentiefe und die gleiche Beugungsunschärfe - also den gleichen Winkeldurchmesser des Beugungsscheibchens - zu erhalten, muss eine Kamera mit doppelt so großer Brennweite mit halb so großer Blendenzahl - also mit gleicher Öffnungsweite - betrieben werden.
Der Stellweg entlang der optischen Achse im Bildraum, der sich bei der Scharfstellung aus dem Unendlichen ergibt, wenn sich das scharfzustellende Objekt in der Objektweite befindet, lässt sich für ein Objektiv mit der Brennweite über die folgenden Beziehung berechnen:

Die folgende Tabelle zeigt beispielhaft verschiedene Bildsensorklassen und die jeweilige äquivalente Blendenzahlen bei konstanter Öffnungsweite. Dabei resultieren immer die gleiche Schärfentiefe und die gleiche relative Beugungsunschärfe. Ferner sind für ein Objektiv mit Normalbrennweite die Längen der entsprechenden Stellwege im Bildraum angegeben, die sich bei der Scharfstellung aus dem Unendlichen ergeben, wenn sich das scharfzustellende Objekt in einer Objektweite von einem Meter ( ) befindet.

| Bildsensorklasse | Äquivalente Blendenzahl bei lichtstarkem Objektiv |
Äquivalente Blendenzahl bei lichtschwachem Objektiv |
Länge des Stellwegs in der Bildebene in mm bei der Scharfstellung von unendlich auf ein Meter |
|---|---|---|---|
| Miniatur | - | 2,0 | 0,049 |
| Kompakt | - | 2,8 | 0,082 |
| 2/3-Zoll | 0,7 | 4,0 | 0,17 |
| 1-Zoll | 1,0 | 5,6 | 0,33 |
| Micro Four Thirds | 1,4 | 8,0 | 0,64 |
| APS-C | 2,0 | 11 | 1,1 |
| Vollformat | 2,8 | 16 | 2,6 |
| Mittelformat | 4,0 | 22 | 5,3 |
| Großformat | 5,6 | 32 | 11,1 |
Äquivalente Lichtempfindlichkeit
BearbeitenDas Bildqualität hängt auch von der Lichtmenge ab, die durch das Objektiv auf den Bildsensor oder den photographischen Film geworfen wird. Die aufgefangene Lichtmenge kann als Maß für die Lichtempfindlichkeit mit dem Belichtungsindex (wird umgangssprachlich auch als ISO-Zahl bezeichnet) beschrieben werden – je höher der Belichtungsindex beziehungsweise der Belichtungswert ist (siehe auch Kapitel Belichtungswert), desto weniger Licht wird für eine Aufnahme verwendet und desto kürzer muss bei gleicher Blendenzahl belichtet werden.

Bei vorgegebenem Belichtungsindex, gleichem Belichtungswert beziehungsweise gleicher Leuchtdichte, gleichem Bildwinkel (äquivalente Brennweite) und gleicher Öffnungsweite (äquivalente Blendenzahl) resultiert für größere Bildformate eine längere Belichtungszeit. Um unter diesen Umständen bei gleicher Bildauflösung mit der gleichen Lichtmenge eine vergleichbare Bildqualität zu erhalten, muss eine Kamera mit einem halb so großen Bildsensor bei gleicher Belichtungszeit mit einem um den Faktor 4 kleineren (äquivalenten) Belichtungsindex betrieben werden. Wird sie bei gleichem Belichtungsindex mit einem Viertel der Belichtungszeit (äquivalente Belichtungszeit) betrieben, registriert sie allerdings auch nur ein Viertel der vergleichbaren Lichtmenge.
Eine ähnliche Situation ergibt sich bei halb so großem Bildsensor, wenn Objekte mit einer viermal so hohen Leuchtdichte und somit einem um den Summanden 2 erhöhten Belichtungswert bei gleicher Belichtungszeit und gleichem Belichtungsindex aufgenommen werden.
Die folgende Tabelle zeigt Beispiele für äquivalente Lichtempfindlichkeiten bei gleicher Belichtungszeit, äquivalente Belichtungswerte bei gleicher Belichtungszeit beziehungsweise äquivalente Belichtungszeiten bei gleichem Belichtungsindex für verschiedenen Bildsensorklassen:
| Bildsensorklasse | Äquivalenter Belichtungsindex bei gleicher Belichtungszeit |
Äquivalenter Belichtungswert EV bei gleicher Belichtungszeit |
Äquivalente Belichtungszeit t in s bei gleichem Belichtungsindex |
|---|---|---|---|
| Miniatur | 50 | 6 | 1/1000 |
| Kompakt | 100 | 5 | 1/500 |
| 2/3-Zoll | 200 | 4 | 1/250 |
| 1-Zoll | 400 | 3 | 1/125 |
| Micro Four Thirds | 800 | 2 | 1/60 |
| APS-C | 1600 | 1 | 1/30 |
| Vollformat | 3200 | 0 | 1/15 |
| Mittelformat | 6400 | -1 | 1/8 |
| Großformat | 12800 | -2 | 1/4 |
Äquivalenter Fokussierungsfehler
BearbeitenDer durch eine fehlerhafte Einstellung der Objektweite verursachte maximale Zerstreuungskreisdurchmesser muss auf die Bilddiagonale bezogen werden, um vergleichbare Bedingungen zu erhalten. Je kürzer die für ein Bild erforderliche Brennweite und je kleiner der verwendete Bildkreis sind, desto kleiner wird der maximale Zerstreuungskreisdurchmesser und damit auch der Fokussierungsfehler, der eine vorgegebene Unschärfe erzeugt. Demzufolge wird auch der Stellweg zur Scharfstellung zwischen zwei bestimmten Objektweiten entsprechend kleiner.
Die folgende Tabelle zeigt Beispiele für äquivalente Zerstreuungskreisdurchmesser und äquivalente Fokussierungsfehler bei gleichem Bildwinkel und bei äquivalenter Blendenzahl für verschiedenen Bildsensorklassen, wenn der Durchmesser der Zerstreuungskreise nicht größer als ein Tausendstel der Bilddiagonale werden darf:
| Bildsensorklasse | Äquivalente Blendenzahl |
Äquivalenter Zerstreuungskreis- durchmesser in µm |
Äquivalenter Fokussierungsfehler in µm |
|---|---|---|---|
| Miniatur | 1,0 | 5,4 | 5,4 |
| Kompakt | 1,4 | 7,6 | 11 |
| 2/3-Zoll | 2,0 | 11 | 22 |
| 1-Zoll | 2,8 | 15 | 42 |
| Micro Four Thirds | 4,0 | 22 | 87 |
| APS-C | 5,6 | 30 | 170 |
| Vollformat | 8,0 | 43 | 350 |
| Mittelformat | 11 | 59 | 650 |
| Großformat | 16 | 87 | 1400 |
Falschlicht
BearbeitenBei einer idealen optischen Abbildung wird jeder Objektpunkt entsprechend dem dazugehörigen Abbildungsmaßstab geometrisch exakt in einen Bildpunkt übertragen. Bei Falschlicht handelt es sich allgemein um unerwünschtes Licht im Bild, also Lichtsignale, die nicht vom entsprechenden Punkt in der Objektebene stammen (siehe auch ISO 18844). Es gibt zahlreiche Ursachen und Quellen für Falschlicht, das abseits der jeweiligen geometrisch exakten Bildpunkte in die Bildebene gelangen kann:
- Licht, das an Störstellen von optischen Medien gestreut wird.
- Licht, das durch einfache oder mehrfache Fresnel-Reflexion an Grenzflächen von (unvergüteten) optischen Medien ins Bild gelangt.
- Licht, das an Fassungen oder Blenden im Strahlengang gebeugt, reflektiert oder gestreut wird.
- Licht, das durch gerichtete oder ungerichtete Reflexion sowie durch Beugung an innenliegenden Gehäuseteilen des optischen Systems abgelenkt wird.
- Licht, das durch Lichtlecks in das optische System gelangt.
- Licht, das von Lichtquellen innerhalb des optischen Systems stammt.
- Licht, das durch Abbildungsfehler (Aberrationen) nicht in die geometrisch korrekten Bildorte abgelenkt wird.
- Licht, das von einem Objektpunkt durch fehlerhafte Entfernungseinstellung nicht in den entsprechenden Punkt in der dazugehörigen Bildebene, sondern in einen Zerstreuungskreis der tatsächlich gewählten Bildebene abgebildet wird.
Die Bilder der das Falschlicht verursachenden Objektpunkte und Lichtquellen können innerhalb aber auch außerhalb des zu erfassenden Bildfelds liegen. Im noch weiter gefassten Sinn erzeugen auch elektronisches Rauschen oder Digitalisierungsrauschen unerwünschte Signale in elektronischen und digitalen Bildern. In digitalen Bildern sind die durch die vielfältigen Quellen verursachten, unerwünschten Bildsignale nicht immer ohne weiteres zu unterscheiden. Nichtsdestoweniger können einige der Störeffekte mit automatischer oder manueller Bildbearbeitung vermindert oder sogar vollständig kompensiert werden.
Gegenlicht
BearbeitenEine häufige Situation stellt Gegenlicht dar. In diesem Fall wird eine Lichtquelle direkt abgebildet, oder sie befindet sich in der Nähe des abgebildeten Objektfelds. In der Abbildung werden durch Falschlicht Lichtsignale erzeugt, die nicht direkt Objektpunkten entsprechen.
Der graue Schirm auf der linken Seite der ersten der folgenden Abbildungen wird durch das Objektiv in die Bildebene abgebildet. Der rote Laserstrahl, dessen Lichtquelle sich von der optischen Achse aus gemessen 10° außerhalb des Bildwinkels befindet, ist im Idealfall in der Bildfläche nicht sichtbar, sondern wird in der Kamera absorbiert. In der Praxis trifft durch gerichtete und ungerichtete Reflexionen oder Beugung innerhalb des Objektivs dennoch Licht der Lichtquelle auf die Bildfläche (Abbildung mit einem typischen Beispiel in der Mitte).
Falschlicht, das durch außerhalb des Objektfeldes vorhandene Lichtquellen verursacht wird, kann leicht durch die Verwendung einer Streulichtblende vor dem Objektiv (Abbildung rechts, auch Gegenlichtblende genannt) reduziert oder sogar vollständig vermieden werden.
- Zur Wirkung von Streulicht
-
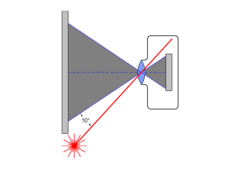 Unerwünschter Einfluss von Gegenlicht, das sich außerhalb Objektfeldes befindet
Unerwünschter Einfluss von Gegenlicht, das sich außerhalb Objektfeldes befindet -
 Exemplarische fotografische Aufnahme mit unerwünschtem Einfluss von Laserlicht außerhalb des Objektfeldes
Exemplarische fotografische Aufnahme mit unerwünschtem Einfluss von Laserlicht außerhalb des Objektfeldes -
 Beispiel einer Streulichtblende zur Vermeidung von Falschlicht in der Bildfläche
Beispiel einer Streulichtblende zur Vermeidung von Falschlicht in der Bildfläche



Räumliche Motive
BearbeitenBei räumlichen Motiven ergibt sich bei entozentrischen und perizentrischen Abbildungen das Problem, dass die Objektweite nicht konstant ist. Dadurch kommt es für ein räumliches Objekt zu unterschiedlichen Abbildungsmaßstäben im Bild. Durch die Verwendung von objektseitig telezentrischen Objektiven (siehe oben), bei denen der Abbildungsmaßstab von der Objektweite unabhängig ist, kann dieses Problem vermieden werden.


Betrachten wir ein kugelförmiges Objekt mit dem Radius , dessen Mittelpunkt sich im Abstand von der optischen Achse in der Objektebene G befindet und über die Hauptebene H verzeichnungsfrei in die Bildebene B abgebildet wird. Die Objektweite beträgt und die Bildweite . Das Zentrum dieser Kugel wird im Abstand von der optischen Achse in die Bildebene projiziert. Der Abbildungsmaßstab beträgt für diesen Punkt:



Bei undurchsichtigen Objekten wird jedoch nur die Oberfläche des Körpers abgebildet und die beiden Tangentenpunkte der Sichtstrahlen auf die Oberfläche der Kugel in der Schnittebene befinden sich näher beziehungsweise entfernter als die Objektweite des Mittelpunkts der Kugel, so dass sich für den näheren Punkt die Objektweite und für den ferneren Punkt die Objektweite ergibt. Daraus resultieren die entsprechenden Abbildungsmaßstäbe und :




Die beiden Objektweiten und können wie folgt konstruiert und berechnet werden:
Der Abstand vom Hauptpunkt zum Mittelpunkt der Kugel ist :

Die Höhe kann über die Betrachtung ähnlicher Dreiecke aus folgender Verhältnisgleichung gewonnen werden:


Die Differenz ergibt sich ebenfalls aus einer Verhältnisgleichung, die auf ähnlichen Dreiecken beruht:


Der Grenzwert von für große Objektweiten geht gegen null:

Die Hilfsgröße kann mit Hilfe des Satzes des Pythagoras berechnet werden:

Die Differenz kann dann wiederum über die entsprechenden ähnlichen Dreiecke aus einer Verhältnisgleichung abgeleitet werden:


Befindet sich der Mittelpunkt der Kugel auf der optischen Achse ( ), dann ist .


Die gesuchten Objektweiten ergeben sich dann schließlich wie folgt:


Die beiden entsprechenden Abbildungsmaßstäbe und hängen bei vorgegebener Objektweite des Mittelpunkts , vorgegebenem Abstand von der optischen Achse in der Objektebene G und vorgegebenem Radius des kugelförmigen Objektes nur von der Bildweite ab, die für alle Bildpunkte allerdings identisch ist. Für das Verhältnis dieser beiden Abbildungsmaßstäbe ergibt sich dann also wie folgt:


Die unterschiedlichen Abbildungsmaßstäbe entlang der vom Hauptpunkt aus gesehenen sichtbaren Konturen eines kugelförmigen Objektes führen dazu, dass nicht der Radius der entsprechenden Kugel in der Größe der optischen Abbildung wiedergegeben wird. Je näher der sichtbare Punkt auf der Kontur an der Hauptebene liegt, desto größer ist der Abbildungsmaßstab. Dies führt dazu, dass Objektteile von Kugeln, deren Konturpunkte weiter seitlich von der optischen Achse entfernt sind, stärker vergrößert werden als Objektteile, deren Konturpunkte näher an oder sogar auf der optischen Achse liegen. Eine Kugel, deren Mittelpunkt außerhalb der optischen Achse liegt, wird daher nicht kreisrund, sondern als Oval abgebildet.
Dieser Effekt tritt insbesondere bei weitwinkligen Aufnahmen mit großen Bildwinkeln auf, bei denen unter Umständen eine noch stärker hervortretendee Verzeichnung (siehe oben) hinzukommt, da hierbei der Abbildungsmaßstab aufgrund von Lagefehlern in der Abbildung über das Bildfeld variiert. In der Abbildung rechts ist eine beispielhafte Aufnahme zu sehen, bei denen die Verformung der Kugelbilder am Rand der Aufnahme hauptsächlich von der Verzerrung durch die unterschiedlichen Objektweiten der aufgenommenen Kugeln zustande kommt.
Bewegte Motive
BearbeitenSenkrecht zur optischen Achse
BearbeitenBei der Aufnahme von bewegten Motiven, die sich in der Objektweite senkrecht zur optischen Achse mit der Geschwindigkeit bewegen, darf für ein Einzelbild eine maximale Belichtungszeit von nicht überschritten werden, wenn im Bild keine Bewegungsunschärfe zu erkennen sein soll.



Die Bewegungsunschärfe wird bei der Verwendung einer bestimmten Brennweite im Bild mit dem Abbildungsmaßstab in die Bildunschärfe skaliert:



Diese Bildunschärfe soll in der Regel einen festzulegenden Bruchteil der Bilddiagonale nicht überschreiten:

Hierbei kann für , wie bei der Festlegung des maximal tolerierbaren Zerstreuungskreisdurchmessers bei der Bestimmung der visuellen Schärfentiefe, zum Beispiel ein Wert zwischen 1000 und 1500 festgelegt werden.
Für die maximale Belichtungszeit resultiert dann:

Für ein Motiv, das sich zum Beispiel mit einer Geschwindigkeit und in einer Objektweite an einer unbewegten Kamera mit einer Brennweite und einer Bilddiagonale vorbeibewegt, ergibt sich mit eine maximale Belichtungszeit .






Auf der optischen Achse
BearbeitenBei der Aufnahme von bewegten Motiven, die sich mit der Geschwindigkeit auf eine Kamera zubewegen oder sich von ihr wegbewegen, darf für ein Einzelbild eine maximale Belichtungszeit von nicht überschritten werden, wenn im Bild bei der von der optischen Achse aus gemessenen Bildhöhe keine Veränderung des Abbildungsmaßstabs zu erkennen sein soll. Ferner darf das Motiv den Bereich der Schärfentiefe zwischen Fernpunkt und Nahpunkt im Objektraum nicht verlassen.



Von der optischen Achse aus gemessen ergibt sich die maximale Objekthöhe aus der halben Bilddiagonale und dem Abbildungsmaßstab :


Bei der Änderung der Objektweite um resultiert eine geänderte Bildhöhe , und die entsprechenden Abbildungsmaßstäbe und lauten:





Die Änderung der Bildhöhe ergibt sich daraus und erneut mit einem festzulegenden Bruchteil der Bilddiagonale für die maximale Verschiebung im Bild (siehe oben) wie folgt:


Aus dieser maximalen Bildhöhenänderung folgt schließlich die Gleichung für die entsprechende Objektweitenänderung :

Für große Objektweiten ( ) gilt in guter Näherung:


Für ein Motiv, das sich zum Beispiel mit einer Geschwindigkeit und in einer Objektweite auf eine Kamera mit einer Brennweite und einer Bilddiagonale zubewegt, ergibt sich bei einer eingestellten Blendenzahl mit eine Schärfentiefe . Die maximale Bewegungsstrecke entlang der optischen Achse darf innerhalb des Schärfentiefebereichs 40 Millimeter nicht überschreiten, ohne dass sich der Abbildungsmaßstab in den Bildecken zu stark ändert ( ).




Für die maximale Belichtungszeit resultiert entsprechend:

Somit beträgt die maximale Belichtungszeit im obigen Beispiel .

Bei Motiven, die das Bild nicht bis in die Bildecken ausfüllen, ergeben sich entsprechend längere Belichtungszeiten, da die Bildhöhen in der Nähe der optischen Achse weniger stark variieren als in den Bildecken. Auf der optischen Achse selbst ist die Bildhöhe immer null, da auch das entsprechende Objekt sich auf der optischen Achse befinden muss.
Bei einer Nachfokussierung während der Aufnahme kann es insbesondere bei Objektiven mit innenliegender Fokussierung (IF) zu Änderungen des Abbildungsmaßstabs kommen, die nicht auf eine Änderung der Objektweite zurückzuführen sind und gegebenenfalls ebenfalls berücksichtigt werden müssen.
Belichtung
BearbeitenDie Helligkeits- und Farbwerte in einer optischen Abbildung müssen zunächst einem endlichen Farbraum zugeordnet werden, damit sie bei der Bildwiedergabe korrekt reproduziert werden können.
Helligkeiten
BearbeitenDie Helligkeiten im Bild werden durch die entsprechenden Leuchtdichten repräsentiert (siehe auch Kapitel Leuchtdichte).
Der Farbraum ist durch den Schwarzwert begrenzt, bei dem gar keine Helligkeit vorliegt. Der Weißwert entspricht in der Regel dem hellstmöglichen Punkt im Bild, und dieser kann wegen der extrem großen potentiellen Spannweite für die Helligkeitswerte einer Aufnahme nicht allgemein festgelegt werden. Daher ist es in der Praxis sinnvoll, eine Belichtungsmessung durchzuführen, bei der der Bereich maximaler Helligkeit ermittelt und dem Weißwert in der Aufnahme zugeordnet wird.
Die Verteilung der Helligkeiten der Bildpunkte kann zum Beispiel in sogenannten Histogrammen dargestellt werden.
Siehe hierzu auch: Histogramme
Das Histogramm zeigt die Verteilung der Häufigkeiten von gleichen Helligkeiten in einem digitalen Bild. In der Regel befinden sich ganz links die Häufigkeit des Schwarzwertes und ganz rechts die Häufigkeit des Weißwertes. Dazwischen werden die Häufigkeiten der Helligkeitsstufen zwischen Schwarz- und Weißwert dargestellt.
Wenn die Helligkeiten in Bildpunkten die Helligkeit des Weißpunktes überschreiten, werden die gespeicherten Helligkeiten dieser Bildpunkte auf die Helligkeit des Weißpunktes begrenzt (englisch: clipping). In den digitalen Bilddaten ist dann keine Differenzierung dieser Bildpunkte mehr möglich. Die Modulation zwischen den Bildpunkten geht verloren, obwohl die Objekthelligkeiten unterschiedlich hell waren.
Bei digitalen photographischen Geräten mit Live-View-Funktion können die entsprechenden Bildbereiche auf einem Bildschirm oder in einem elektronischen Sucher durch auffällige, gegebenenfalls blinkende Farben oder mit regelmäßigen Mustern hervorgehoben werden, damit der Nutzer eine solche Überbelichtung sofort erkennen und durch eine Belichtungskorrektur beheben kann. Eine Belichtungskorrektur kann zum Beispiel durch das Abblenden des Objektivs, die Verkürzung der Belichtungszeit, das Einbringen eines Lichtfilters in den Strahlengang oder die Reduktion der Objekthelligkeit erfolgen.
Das folgende Beispiel zeigt ein Bild mit überbelichteten Teilbereichen, die als Weißwert gespeichert sind, mit dem dazugehörigen Histogramm. In zwei weiteren Bildvarianten wurden die überbelichteten Bildpunkte mit dem Weißwert durch eine Zebramusterung (englisch: zebra patterning) beziehungsweise durch eine Rotfärbung hervorgehoben:
- Überbelichtung
-
 Photographische Aufnahme mit überbelichtetem Teilbereichen im bewölkten Himmel, die Schneebedeckung ist dunkler als der Weißwert
Photographische Aufnahme mit überbelichtetem Teilbereichen im bewölkten Himmel, die Schneebedeckung ist dunkler als der Weißwert -
 Histogramm mit der dazugehörigen Verteilung der Häufigkeiten von Helligkeitswerten - wegen der Überbelichtung ist der Weißpunkt am rechten Rand des Histogramms sehr häufig vertreten
Histogramm mit der dazugehörigen Verteilung der Häufigkeiten von Helligkeitswerten - wegen der Überbelichtung ist der Weißpunkt am rechten Rand des Histogramms sehr häufig vertreten -
 Hervorhebung der überbelichteten Bildpunkte durch eine Zebramusterung
Hervorhebung der überbelichteten Bildpunkte durch eine Zebramusterung -
 Hervorhebung der überbelichteten Bildpunkte durch Färbung mit gesättigtem Rot
Hervorhebung der überbelichteten Bildpunkte durch Färbung mit gesättigtem Rot




Farben
Bearbeiten
In Bezug auf die Farben ist der Farbraum ebenfalls begrenzt. Bei jeder Wellenlänge kann eine maximale Farbsättigung erfasst und gespeichert werden. zwischen dem Schwarzpunkt und dem Weißpunkt verläuft im mittleren Bereich des Farbraums eine Graulinie oder Grauachse, auf denen die farbneutralen Bildpunkte liegen.
Wenn der Wiedergabefarbraum mindestens so groß ist, wie der Farbraum der Aufnahme, können die Farben mit den entsprechenden Helligkeiten und Farbsättigungen reproduziert werden. Ist der Wiedergabefarbraum kleiner, können bestimmte Farben in der geforderten Sättigung nicht reproduziert werden, sondern werden häufig mit der maximal möglichen Farbsättigung ausgegeben.
Es können jedoch auch verschiedene Maßnahmen zur Kompensation getroffen werden. Hierzu kann der Farbraum eines Bildes umkehrbar eindeutig (bijektiv) in den Farbraum eines Wiedergabemediums transformiert werden. In diesem Fall können zwischen unterschiedlichen Punkten zwar Unterschiede erkannt werden, die Farbtöne und Farbsättigungen der wiedergegebenen Punkte weichen dann aber alle mehr oder weniger von den gemessenen Punkten ab. Es ist also abzuwägen, ob einer möglichst differenzierten Wiedergabe oder einer farbverbindlichen Wiedergabe der Vorzug gegeben werden soll.
Stehbilder
BearbeitenBei Aufnahmen von Stehbildern wird ein Bild registriert, das den Zustand eines bewegten oder unbewegten, photographisch erfassten Objektes innerhalb einer bestimmten Zeitspanne in einer einzelnen projizierten Aufnahme einfriert. Kameras können gegebenenfalls mehrere Stehbilder innerhalb einer Sekunde aufnehmen, so dass die Grenzen zwischen Folgen von Stehbildern und Bewegtbildaufnahmen (siehe unten) fließend sind. Bei Bildfrequenzen von über 20 Bildern pro Sekunde kann ein Mensch üblicherweise keine einzelnen Stehbilder mehr erkennen, sondern nimmt eine solche Bildserie als Filmsequenz wahr.
Kameras
BearbeitenEine Kamera besteht aus einem reell abbildenden, optischen System, das einen Gegenstand aus der Objektebene in eine Bildebene abbildet, wo das Bild aufgefangen und gegebenenfalls registriert werden kann. Das optische System besteht in der Regel aus einem Objektiv, das im Gegensatz zu einer einzelnen Feldlinse, einem Hohlspiegel (Spiegelteleskop) oder einer Lochblende (Lochkamera) in der Regel aus mehreren Linsen (respektive Linsengruppen) besteht.
Die Objektive sind häufig korrigiert, damit bestimmte Abbildungsfehler vermindert werden, wie zum Beispiel Verzeichnung, Öffnungsfehler (sphärische Aberration) oder Farbfehler (chromatische Aberration). Objektive mit variabler Brennweite werden Zoomobjektive genannt. Eine weitere wichtige Kenngröße von Objektiven ist die maximale Blendenöffnung, die meistens mit der kleinsten einstellbaren Blendenzahl angegeben wird.
Siehe hierzu auch: Blendenzahl
Das reelle Bild kann auf einer transparenten Mattscheibe oder auf einem reflektierenden Projektionsschirm beobachtet, oder mit einem photographischen Film beziehungsweise mit einem elektronischen Bildsensor registriert werden.
Kompaktkameras
Bearbeiten
Kompaktkameras zeichnen sich dadurch aus, dass alle ihre Bestandteile auf engem Raum zusammengefügt sind. Dies bedeutet jedoch nicht zwangsläufig, dass solche Kameras absolut gesehen klein sind, sondern lediglich, dass sie vergleichsweise klein sind. Die tatsächliche Bauform und Größe hängen von vielen Parametern ab, wie zum Beispiel vom Abbildungsmaßstab, von der Bildgröße und vom Bildwinkel.
Neben dem Objektiv und einem Bildsensor sind digitale Kompaktkameras häufig auch noch mit einer autarken Energieversorgung und einem Speichermedium ausgestattet. Zusätzlich gibt es oft noch einen Bildschirm und einen Auslöser, gegebenenfalls auch einen Sucher, ein Blitzlicht oder eine Leuchte für die Aufhellung des zu photographierenden Objekts.
Systemkameras
BearbeitenSystemkameras gehören zu einem Kamerasystem und können durch den Austausch von kompatiblen Komponenten verändert oder durch die Hinzufügung von Komponenten erweitert werden. Zu den Hauptkomponenten gehören ein Kameragehäuse und ein Wechselobjektiv. Weitere Komponenten sind beispielsweise Blitzlichtgeräte, optische Filter, Fernauslöser, Sucher, Einstellhilfen, Belichtungsmesser oder Module für die Erfassung von Metadaten (Georeferenzierung, Zeiterfassung).
Spiegelreflexkameras sind Systemkameras mit einem optischen Sucher. Sie haben einen Klappspiegel, der die optische Abbildung vor der Aufnahme auf eine Einstellscheibe umlenkt, so dass diese vom Photographen im optischen Sucher angeschaut und beurteilt werden kann. Während der Aufnahme wird der Spiegel weggeklappt, so dass das Bild registriert werden kann; im Sucher ist dann keine Abbildung mehr zu sehen. Moderne Spiegelreflexkamera sind mit einem System zur automatischen Entfernungseinstellung ausgestattet, das einen Teil des Lichtes der optischen Abbildung vor der Aufnahme auf einen separaten Sensor umlenkt.
Siehe hierzu auch: Autofokussysteme
Spiegellose Systemkameras waren im 20. Jahrhundert meist Messucherkameras, die mit einem zusätzlichen optischen Suchersystem mit einem Okular ausgestattet sind, mit dessen Hilfe der Photograph den Bildausschnitt wählen und die Entfernungseinstellung vornehmen kann.

Seit Beginn des 21. Jahrhunderts gibt es digitale spiegellose Systemkameras, die optional mit einem elektronischen Sucher ausgerüstet sind, und bei denen die Belichtungsmessung und die Entfernungseinstellung über den Bildsensor erfolgen können. Bei spiegellosen Systemkameras kann das Sucherbild auch während der photographischen Belichtung zur Verfügung gestellt werden.
Plenoptische Kameras
Bearbeiten
Links: Abbildung mit mehreren benachbarten Objektiven auf verschiedene benachbarte Bereiche eines Bildsensors oder auf mehrere Bildsensoren.
Rechts: Aufnahme mit einem Objektiv und mehreren zusätzlichen Mikrolinsen vor dem Bildsensor.
Bei plenoptischen Kameras (auch Lichtfeldkameras genannt) wird nicht nur eine Ebene eines dreidimensionalen Objektes projiziert, sondern es werden mehrere Projektionsebenen festgehalten, die später mit geeigneter Software oder digitaler Signalverarbeitung miteinander verknüpft werden können. Dabei können in geringem Umfang der Abbildungsmaßstab und der Betrachtungswinkel variiert werden, aber vor allem können Schärfeebenen für sehr verschiedene Objektweiten realisiert und auch kombiniert werden. Mit anderen Worten können die gewünschte Objektweite und der dazugehörige Schärfentiefebereich nach der Aufnahme festgelegt werden, so dass eine Scharfstellung vor der Aufnahme sogar entfallen kann.
Die Variante mit einem Objektiv hat den Vorteil, dass nur ein Objektiv eingesetzt werden muss, dass entsprechend hochwertig gestaltet werden kann, jedoch den Nachteil, dass ein zusätzliches Mikrolinsen-Array erforderlich ist. Bei der anderen Variante müssen mehrere Objektive eingesetzt werden, bei gleichem Bildwinkel kann die Bauform so jedoch erheblich flacher gestaltet werden.
- Vier verschiedene Repräsentationen einer einzigen plenoptischen Makroaufnahme
-

-

-

-





Für die Animation von Bilderfolgen einer plenoptischen Kamera siehe:
Bewegtbilder
BearbeitenBei Aufnahmen von Bewegtbildern ergeben sich oft besondere Anforderungen an die automatische Scharfstellung und Blendensteuerung. Da sich die Entfernung und Helligkeit der Motive kontinuierlich und stetig ändern kann, müssen diese im Objektiv ebenso kontinuierlich und stufenlos nachgeführt werden können, um Helligkeitssprünge zwischen aufeinanderfolgenden Einzelbildern und ungewollte Unschärfen zu vermeiden.
Bewegtbilder stellen in Bezug auf die Pixelfehler höhere Ansprüche an die verwendeten Bildsensoren, da auf dem Bildsensor örtliche Häufungen von Fehlern bei Schwenks und bewegten Motiven als ortsfeste Unregelmäßigkeiten besonders deutlich sichtbar und störend sein können.
Synchrone Tonaufnahmen
BearbeitenWenn zu den Bewegtbildern auch synchrone Tonaufnahmen gemacht werden sollen, ist es gegebenenfalls sinnvoll, Objektive und Kameragehäuse mit geringer Geräuschentwicklung zu benutzen. Hierzu gibt es spezielle Objektive mit Linearmotoren oder mit Ultraschallmotoren, die bei der Scharfstellung oder der Einstellung von Blende oder Entfernung fast keine hörbaren Geräusche verursachen. Alternativ können externe Mikrophone an die Kamera angeschlossen oder digitale Audiorekorder eingesetzt werden.
Bildstabilisierung
Bearbeiten
Es gibt verschiedene Möglichkeiten der Bildstabilisierung, wobei zwischen rein mechanischer, optomechanischer, elektronischer und informationstechnischer Bildstabilisierung unterschieden werden kann. In der Regel können alle Arten der Bildstabilisierung auch kombiniert werden.
Die mechanische Bildstabilisierung geschieht in der Regel mit mechanischen Aufbauten am optischen System. Diese können statisch sein, wie zum Beispiel ein Stativ. Sie können aber auch den durch die Massenträgheit verursachten Impuls oder Drehimpuls von Gegenständen verwenden, um das optische System im Raum stabil ausgerichtet zu halten, wie zum Beispiel mit Kreiselstabilisatoren oder mit Schwebestativen, die mit Zusatzgewichten beschwert wurden.
Die optomechanische Bildstabilisierung ist im optischen System integriert. Im allgemeinen wird die auszugleichende Unruhe heute mit elektronischen Bewegungssensoren gemessen und kann dann mit Aktoren ausgeglichen werden, die die Lage von bestimmten optischen Elementen oder Bildsensoren verändern.
Die elektronische Bildstabilisierung erfolgt durch elektronische Signalverstärkung im Lichtwandler (siehe auch Abschnitt Lichtwandlung), die eine Verkürzung der Belichtungszeit und somit sowohl eine Verringerung von Bewegungs- als auch von Verwacklungsunschärfen zur Folge hat. Hierbei besteht allerdings die Gefahr, dass Rauschsignale ebenfalls verstärkt werden und die Bildqualität erniedrigen.
Nach der Analog-Digital-Wandlung der elektrischen Signale können die Daten auf sehr vielfältige Weise auf informationstechnischem Wege analysiert und manipuliert werden (siehe auch Abschnitt Digitale Bilder), um eine Bildstabilisierung durchzuführen.
Optomechanische Bildstabilisierung
Bearbeiten
Position und Ausrichtung einer Kamera im Raum können sich während einer Aufnahme verändern, so dass durch diese Bewegung in der Aufnahme Unschärfen entstehen können. Prinzipiell gibt es sechs unabhängige Freiheitsgrade, in der sich eine Kamera in Bezug auf ein aufzunehmendes Objekt gleichzeitig bewegen kann:
- Translation entlang der
- optischen Achse O (rot), nach vorne oder nach hinten
- horizontalen Achse H (blau) senkrecht zur optischen Achse O, nach rechts oder nach links
- vertikalen Achse V (grün) senkrecht zur optischen Achse O, nach oben oder nach unten
- Rotation um die
- optische Achse O (rot), rechts oder links herum ("rollen", englisch: "to roll" = "wanken")
- horizontale Achse H (blau) senkrecht zur optischen Achse, nach oben oder nach unten ("nicken", englisch: "to pitch" = "neigen")
- vertikale Achse V (grün) senkrecht zur optischen Achse, nach rechts oder nach links ("gieren", englisch: "to yaw" = "schwanken")
Zur Ermittlung der Bewegung können Objektive und Kameragehäuse mit Beschleunigungssensoren ausgestattet werden. Mit optomechanischen Systemen können im Objektiv oder am Bildsensor im Kameragehäuse entsprechende Kompensationsbewegungen erzeugt werden. Bei modernen digitalen Kamerasystemen können die Bildstabilisatoren im Objektiv und im Kameragehäuse kombiniert und synchronisiert werden.
Eine Verschiebung entlang der optischen Achse kann durch eine Nachfokussierung kompensiert werden, wobei die Objektweite nachgeführt werden muss.
Die Verschiebungen senkrecht zur optischen Achse können durch eine parallele Verschiebung des Strahlengangs oder durch eine entsprechende Verschiebung der Bildebene kompensiert werden.
Eine Drehung um die optische Achse ("rollen", englisch: "roll") kann durch eine mitlaufende Rotation der Bildebene kompensiert werden.
Die Rotationen senkrecht zur optischen Achse können durch eine Verkippung des Strahlengangs oder durch eine entsprechende Verkippung der Bildebene kompensiert werden. Hierbei kann zwischen der Verkippung zur Horizontlinie ("nicken", englisch: "pitch") und der Verkippung zur Lotrichtung ("gieren", englisch: "yaw") unterschieden werden.
Die folgenden beiden nacheinander getätigten teleskopischen Aufnahmen verdeutlichen die bildstabilisierende Wirkung bei der freihändigen Aufnahme des farbig szintillierenden Fixsterns Sirius mit einer Belichtungszeit von jeweils 15 Sekunden. Das erste Bild ist ohne eine Bildstabilisierung aufgenommen und das zweite Bild mit einer synchronisierten Bildstabilisierung zwischen dem Superteleobjektiv und dem beweglichen Bildsensor (Abkürzung "IBIS" für "In-Body Image Stabilisation", zu Deutsch "Bildstabilisierung im Gehäuse") eines digitalen Kamerasystems. Die linke Hand befand sich während der Aufnahmen jeweils vorne unter dem Teleobjektiv, die rechte Hand rechts am Kameragehäuse und das rechte Auge stützte das Kameragehäuse an der Suchermuschel. Die Atemluft wurde für die Dauer der Aufnahmen angehalten. In beiden Bildern betragen die Bildhöhe rund ein Bogengrad und die Bildbreite rund zwei Bogengrad. Der Stern bewegte sich während der Belichtung in Bezug auf das horizontale Bezugssystem am Fixsternhimmel nur um 1/16 Bogengrad von links nach rechts. Die vertikale Nickbewegung ("pitch") der Kamera lag bei diesen in Bezug auf die Bildstabilisierung extrem herausfordernden Aufnahmen bei ungefähr einem halben Bogengrad. In beiden Bildern gab es zudem eine kontinuierliche Winkeldrift in horizontaler Richtung. In dieser Konstellation konnten die höherfrequenten Variationen bei aktivierter Bildstabilisierung insbesondere in vertikaler Richtung über mehrere Sekunden fast vollständig stabilisiert werden.
- Wirkung eines Bildstabilisators bei Teleaufnahmen von Sirius
-
 Ohne Bildstabilisierung im Teleobjektiv oder im Kameragehäuse.
Ohne Bildstabilisierung im Teleobjektiv oder im Kameragehäuse. -
 Mit synchronisierter Bildstabilisierung zwischen Teleobjektiv und Kameragehäuse. Zwischenzeitlich konnte die vertikale Nickbewegung der Kamera nicht mehr vollständig kompensiert werden.
Mit synchronisierter Bildstabilisierung zwischen Teleobjektiv und Kameragehäuse. Zwischenzeitlich konnte die vertikale Nickbewegung der Kamera nicht mehr vollständig kompensiert werden.


Rotationsbewegungen
BearbeitenDie Gravitation der Erde verursacht eine konstante Kraft, die beim freien Fall eine Beschleunigung verursacht. Rotieren jedoch Kamera und Objekt in der Zeit auf einen vollen Kreis mit oder um ein Kreiszentrum mit der gleichen Kreisfrequenz




und in der gleichen Richtung im Abstand von der Rotationsachse , entsteht eine Zentripetalkraft, obwohl sich Kamera und Objekt im Bezug zueinander gar nicht bewegen. Dabei wirkt die folgende Zentripetalbeschleunigung auf die Kamera und somit auch auf deren Beschleunigungssensoren:

Erdrotation
BearbeitenAm Äquator beträgt der mittlere Erdradius

und die Kreisfrequenz
- pro siderischem Tag.

Die Dauer eines siderischen Tages beträgt

- oder 23 Stunden, 56 Minuten und 4 Sekunden.

Die entsprechende Kreisfrequenz beträgt dann also
- oder 15,7 Bogensekunden pro Sekunde.

Bei einer teleskopischen Aufnahme mit einem Bildwinkel von 2 Bogengrad (= 120 Bogenminuten = 7200 Bogensekunden) verschiebt sich bei dieser Kreisfrequenz der in einem Inertialsystem erfasste Bildausschnitt schon nach einer halben Sekunde um mehr als den tausendsten Teil seiner Ausdehnung, so dass ab dieser Belichtungszeit von einem menschlichen Betrachter eine zunehmend erkennbare Unschärfe im aufgenommenen Bild entsteht.
Daraus resultiert am Äquator eine konstante Beschleunigung in Richtung Zenit von:

Diese Zentripetalbeschleunigung hat betragsmäßig den 265. Teil der Erdbeschleunigung, und beide wirken am Äquator in Richtung Nadir. Auf Breitengraden nördlich oder südlich des Äquators ist die Zentripetalbeschleunigung betragsmäßig kleiner (gleiche Kreisfrequenz, aber geringerer Abstand von der Rotationsachse) und wirkt in die Richtung senkrecht auf die zwischen Nord- und Südpol verlaufenden Rotationsachse und somit dann auch nicht mehr gleichgerichtet zur Erdbeschleunigung. In Bezug auf eine auf der Erdoberfläche ortsfeste Kamera ändert sich die Richtung dieser Beschleunigungen jedoch nicht. An den Polen selbst wirkt gar keine Zentripetalbeschleunigung mehr.
Rotation der Erde um die Sonne
BearbeitenFür die Rotation der Erde um die Sonne ergibt sich aus dem mittleren Radius der Erdbahn

und aus der Dauer eines siderischen Jahres (365,256 Tage)

die entsprechende Kreisfrequenz:
- oder 0,04 Bogensekunden pro Sekunde.

Die Zentripetalbeschleunigung in Richtung zur Sonne beträgt dann:

Das ist betragsmäßig zirka der 1650. Teil der Erdbeschleunigung.
Maximale Belichtungszeit
BearbeitenEine Kamera, die im Bezug zum Horizont fest ausgerichtet ist, dreht sich aufgrund der Erdrotation mit der Kreisfrequenz um eine bestimmte Achse. Der Drehwinkel beträgt in Anhängigkeit der Belichtungszeit :


Wenn dieser Drehwinkel mit dem diagonalen Bildwinkel der Aufnahme in Beziehung gesetzt wird, ergibt sich das folgende Verhältnis :

Wenn die Erdrotation bei der Bildstabilisierung nicht berücksichtigt wird, führt dieser Anteil während der Belichtung zu einer Überkompensation, die bei zu langen Belichtungszeiten erkennbar werden kann. Für das minimal akzeptable Winkelverhältnis ergibt sich die maximale Belichtungszeit aus der folgenden Umformung:



In Bezug auf empirische Abschätzungen für siehe auch Abschnitt Schärfentiefe und Abschnitt Bewegte Motive.
Für einen Bildwinkel einer teleskopischen Aufnahme von und ein minimal gefordertes Winkelverhältnis ergibt sich beispielsweise eine maximale Belichtungszeit von:



Für einen diagonalen Bildwinkel einer weitwinkligen Aufnahme von und ein minimal gefordertes Winkelverhältnis ergibt sich zum Beispiel eine entsprechend längere maximale Belichtungszeit von:


Als Faustformel gilt, dass die maximale Belichtungszeit in Sekunden, den sechsten Teil des diagonalen Bildwinkels in Grad nicht überschreiten darf:

| Objektivart | Diagonaler Bildwinkel |
Maximale Belichtungszeit |
|---|---|---|
| Fischauge | 180° | 30 Sekunden |
| Ultraweitwinkel | 120° | 20 Sekunden |
| Superweitwinkel | 90° | 15 Sekunden |
| Weitwinkel | 60° | 10 Sekunden |
| Normal | 48° | 8 Sekunden |
| Portrait | 24° | 4 Sekunden |
| Tele | 12° | 2 Sekunden |
| Supertele | 6° | 1,0 Sekunden |
| Ultratele | 3° | 0,5 Sekunden |
In Bezug auf das im 20. Jahrhundert sehr verbreitete Kleinbildsystem (35-Millimeter-Film) ergibt sich überschlägig, dass die maximale Belichtungszeit in Sekunden, 400 Millimeter geteilt durch die verwendete Brennweite nicht überschreiten darf.
Astrophotographie
BearbeitenDiese Überlegungen gelten im Übrigen auch, wenn mit einer ortsfesten Kamera der Sternenhimmel aufgenommen werden soll. Eine im Inertialsystem kompensierende, und somit notwendigerweise im dreidimensionalen Raum orientierte Bildstabilisierung ändert den Bildausschnitt während einer beliebig lange dauernden Belichtung nicht.
Für astronomische Zwecke gibt es Kamerastative, die auf den Himmelspol ausgerichtet werden und mit der Kreisfrequenz der Erde entgegen der Erddrehung (also nach Westen) um die Polachse rotieren. Moderne Systeme, die über zwei beliebige, linear unabhängige Rotationsachsen verfügen, können den Standort der Kamera, die Neigung der optischen Achse zum Horizont und die Himmelsrichtung der optischen Achse erfassen und die entsprechenden Kompensationsdrehungen dann automatisch berechnen und durchführen. Eine Alternative dazu ist die Bewegungskompensation direkt in der Bildebene, wo das Bild während der Aufnahme um die optische Achse entsprechend rotiert und senkrecht dazu verschoben werden kann.
Hierbei ist grundsätzlich zu beachten, dass die Rotation der aufgenommenen Objekte in einem sphärischen äquatorialen System stattfindet, und die Bewegung in der Bildebene von der beobachteten Deklination der Objekte und von der eingesetzten Brennweite abhängt. Siehe auch:
Bewegte Kamera im rotierenden System
BearbeitenBei mit der Geschwindigkeit in Bezug auf die Erdoberfläche bewegter Kamera können aufgrund der Erdrotation zusätzlich auch noch Coriolis-Beschleunigungen auftreten, die senkrecht zur Rotationsachse und senkrecht zur Bewegungsrichtung wirken:



Bewegt sich eine Kamera senkrecht zur Rotationsachse, auf der Erdoberfläche also am Nord- oder Südpol oder entlang eines Breitenkreises wie zum Beispiel dem Äquator, kann das Kreuzprodukt durch das Produkt der Vektorbeträge ersetzt werden, um den Betrag der Coriolis-Beschleunigung zu ermitteln:

Bewegt sich die Kamera beispielsweise in einem Flugzeug mit einer Geschwindigkeit von auf einem Großkreis über den Nordpol (die Kreisfrequenz beträgt hierbei übrigens ungefähr Bogensekunden pro Sekunde), ergibt sich für die Coriolis-Beschleunigung:



Das ist betragsmäßig zirka der 320. Teil der Erdbeschleunigung.
Die Zentripetalbeschleunigung durch die um die Sonne laufende Erdbahn ändert in Bezug auf eine auf der Erdoberfläche ortsfeste Kamera permanent ihre Richtung. Auch die Coriolis-Beschleunigungen von schnell bewegten Kameras liegen in der Größenordnung der Beschleunigungen typischer Wackelbewegungen und Vibrationen von Kameras. Dies kann das Messergebnis der Beschleunigungssensoren beeinflussen und muss für eine Kompensation entsprechend präzise bestimmt und berücksichtigt werden.
Informationstechnische Bildstabilisierung
Bearbeiten
1.: Mit unbewegter Kamera aufgenommene Szene
2.: Mit sich bewegender Kamera aufgenommene Szene
3.: Analyse der gleichen Bildausschnitte (grüner Rahmen) in der mit sich bewegender Kamera aufgenommenen Szene (blauer Rahmen)
4.: Verwendung der analysierten Bildausschnitte der mit sich bewegender Kamera aufgenommenen Szene
Bewegtbilder setzen sich aus aufeinanderfolgenden Einzelbildern zusammen, die in der Regel einen Bildausschnitt zeigen sollen, der sich nicht verändert oder nur langsam ändert, wenn zum Beispiel der Abbildungsmaßstab variiert wird oder die Kamera geschwenkt wird. Bei Aufnahmen, die mit freier Hand oder aus anderen Gründen mit unbeabsichtigt bewegter Kamera erstellt werden, verändert sich der Bildausschnitt mehr oder weniger stark und auf zufällige Weise. Durch die Messung der Bewegung der Kamera mit Bewegungssensoren oder durch eine Bildanalyse mittels Software kann diese Veränderung ermittelt und ausgeglichen werden, wenn in Kauf genommen wird, dass der für die stabilisierte Aufnahme zur Verfügung stehende Bildausschnitt kleiner ist als der von der Kamera erfasste Bildausschnitt. Dabei ergibt sich zwangsläufig eine Reduktion der verfügbaren Information, da auf der einen Seite Bildinhalte verworfen werden müssen und auf der anderen Seite die Bildauflösung der verbleibenden Bildausschnitte im Vergleich zur unstabilisierten Aufnahme reduziert ist.
Die vier Bildsequenzen in der Abbildung aus jeweils drei aufeinanderfolgenden Einzelbildern veranschaulichen die Wirkungsweise einer Bildstabilisierung mit der Translation eines geeigneten Bildausschnittes:
Ein elementares Problem bei diesem Verfahren ist die Ermittlung geeigneter Fixpunkte im zu stabilisierenden Bildausschnitt, da sich das Motiv oder Teilmotive zwischen aufeinanderfolgenden Einzelaufnahmen ebenfalls bewegt haben können, wie der Schmetterling zwischen Katze und Elephant in den Beispielbildern. Ähnliche Probleme ergeben sich, wenn die Kamera während der Aufnahme absichtlich bewegt wird, wie beispielsweise beim Schwenken, oder wenn die Brennweite während der Aufnahme variiert wird.
Mit entsprechend höherem Aufwand können auch Änderungen des Abbildungsmaßstabs und Bilddrehungen zwischen den Einzelaufnahmen ermittelt und durch entsprechenden Transformation ausgeglichen werden, die dann nicht nur die Translation sondern auch die Rotation und Skalierung berücksichtigen muss, wie zum Beispiel eine zweidimensionale Helmert-Transformation. Sollen auch dynamische perspektivische Verzerrungen ausgeglichen werden, können auch noch aufwendigere affine Transformationen angewendet werden.
Eine informationstechnische Bildstabilisierung kann durch eine optomechanische Bildstabilisierung ergänzt werden, um den Kompensationsspielraum zu vergrößern.
Ablenkung von Lichtstrahlen
BearbeitenEs gibt verschiedene Möglichkeiten, die optische Achse in einem optischen System um einen bestimmten Betrag parallel zu verschieben oder um einem bestimmten Winkel zu verkippen. Hierzu können reflektierende oder brechende optische Elemente in den Strahlengang eingebaut werden. An Kanten, Blenden und optischen Gittern wird das Licht gebeugt, so dass die Beugung in bestimmten Fällen ebenfalls für die gezielte Ablenkung von Lichtstrahlen ausgenutzt werden kann.
Bei der Verwendung von optischen Medien, mit unterschiedlichen Brechungsindices muss gegebenenfalls berücksichtigt werden, dass das Licht an jeder Grenzfläche zwischen zwei Materialien mit verschiedener optischer Dichte nicht nur gebrochen, sondern auch reflektiert wird.
Für die Ausbreitung in optischen Medien gilt allgemein immer das Fermatsche Prinzip, das lokal betrachtet mit dem Huygensschen Prinzip veranschaulicht werden kann. Mit diesem Prinzip lassen sich die Effekte Reflexion, Brechung und Beugung erklären.
Refraktion an optischen Übergängen
BearbeitenDie Ausbreitungsgeschwindigkeit von elektromagnetischen Wellen in einem optischen Medium mit der Brechzahl kann mit der Lichtgeschwindigkeit im Vakuum folgendermaßen bestimmt werden:


Die Wellenlänge verkürzt sich mit wachsender Brechzahl linear, da die Frequenz der elektromagnetischen Welle unverändert bleibt:



Brechung findet an einem Punkt O beim Übergang zwischen zwei optischen Medien statt, die sich durch die Ausbreitungsgeschwindigkeiten des Lichts und unterscheiden. Unter Berücksichtigung der Ausbreitung mit Huygensschen Elementarwellen mit der jeweiligen Lichtgeschwindigkeit und entsprechend dem Fermatschen Prinzip legt das Licht den schnellsten Weg zwischen einem Startpunkt A und einem Endpunkt B zurück. Dieser Weg setzt sich aus den beiden Teilstrecken und zusammen.




Für diese beiden Teilstrecken gilt:


Die entsprechenden Laufzeiten in den beiden optischen Medien ergeben sich dann folgendermaßen:


Die gesamte Laufzeit von A nach B ist die Summe dieser beiden Zeiten:


Diese Funktion variiert entlang der Grenzkante zwischen den beiden optischen Medien mit dem Parameter und kann nach diesem differenziert werden, um bei der Nullstelle der Ableitung das Minimum zu ermitteln:



Für die beiden rechtwinkligen Dreiecke ergeben sich die Sinus der Winkel zur Flächennormalen aus den Quotienten zwischen den Gegenkatheten und den Hypotenusen:


Eingesetzt ergibt sich dann:

Bei der Brechung an einer optischen Grenzfläche zwischen den optischen Medien 1 und 2 gilt dieses Snelliussche Brechungsgesetz, das üblicherweise in der folgenden Form mit den beiden zu den Lichtgeschwindigkeiten antiproportionalen Brechzahlen und dargestellt wird:




Wellenoptisch ergibt sich entsprechend den unterschiedlichen Ausbreitungsgeschwindigkeiten und Wellenlängen hierfür das nebenstehende Bild.
Reflexion an optischen Übergängen
Bearbeiten

Beim Übergang eines Lichtstrahls von einem optischen Medium mit der Brechzahl in ein optisches Medium mit der Brechzahl wird das Licht nicht nur gebrochen, sondern an der Grenzfläche auch reflektiert. Dabei spielt es für den Reflexionsgrad keine Rolle, ob das Licht von optische dünneren oder vom optische dichteren Medium auf diese Grenzfläche trifft. Die Richtungen des Lichtstrahls werden durch den Einfallswinkel , den Winkel des reflektierten Lichtstrahls und den Ausfallswinkel beschrieben. Alle Winkel werden zum senkrecht auf der Grenzfläche stehenden Lot, also der Normalen, an der Stelle des Lichtübergangs angegeben.
Für die Reflexion gilt das Reflexionsgesetz:

Bei der Brechung findet eine Transmission statt, und auch hier gilt das Snelliussche Brechungsgesetz:

Der Grad der Reflexion kann mit Hilfe der Fresnelschen Formeln bestimmt werden. Für den Sonderfall senkrecht einfallendes Lichtes gilt dann die folgende Beziehung:



In der nachstehende Tabelle sind die entsprechenden Reflexionsgrade für einige Materialien an der Grenze zu einem Vakuum (beziehungsweise in guter Annäherung auch zu Luft oder anderen Gasen) angegeben:
| Brechzahl | Relexionsgrad | Material |
|---|---|---|
| 1,00 | 0,000 | Vakuum / Luft |
| 1,33 | 0,020 | Wasser |
| 1,38 | 0,025 | Magnesiumfluorid |
| 1,46 | 0,035 | Quarzglas |
| 1,52 | 0,043 | Fensterglas |
| 1,74 | 0,073 | Diiodmethan |
| 2,42 | 0,172 | Diamant |
Mit zunehmend schrägem Lichteinfall wächst der Reflexionsgrad langsam an. Bei Einfallswinkeln , die einen Ausfallswinkel erzeugen, der größer als 90° ist, tritt eine Totalreflexion ein, so dass dann der Reflexionsgrad eins und der Transmissionsgrad null betragen. Der kritische Einfallswinkel kann direkt aus dem Snelliusschen Brechungsgesetzes bestimmt werden:



Die quadratische Abhängigkeit der Reflexion von den Brechzahlen kann zur Verringerung der Gesamtreflexion ausgenutzt werden, indem zwischen die beiden optischen Medien ein weiteres Medium eingebracht oder sogar mehrere weitere Medien eingebracht werden, deren Brechkraft zwischen derjenigen der beiden optischen Medien liegt. Bei senkrechtem Übergang zwischen Fensterglas mit dem Brechungsindex und Vakuum liegt der Reflexionsgrad bei 4,3 Prozent.

Wird auf das Fensterglas eine zusätzliche optische Schicht mit dem Brechungsindex 1,233 aufgebracht, dann beträgt die Reflexion an beiden Grenzflächen, also zwischen Vakuum und optischer Schicht sowie zwischen optischer Schicht und Fensterglas, jeweils 1,1 Prozent, zusammen also nur 2,2 Prozent.

Bei zwei zusätzlichen Schichten mit der Brechzahl 1,150 und 1,322 beträgt die Reflexion an allen drei Grenzflächen jeweils 0,5 Prozent, zusammen also sogar nur 1,5 Prozent.


Hierbei ist zu beachten, dass bei der Reflexion beim Übergang zu einem optisch dichteren Medium ein Phasensprung von 180° auftritt. Beim Übergang zu einem optisch dünneren Medium tritt bei der Reflexion keine Änderung der Phase auf.
Die Wellen mit gleicher Ausbreitungsrichtung und gleicher Wellenlänge interferieren bei gleicher Phasenlage konstruktiv und bei gegenläufiger Phasenlage (die Phasendifferenz beträgt dann 180°) destruktiv. Unter Berücksichtigung der Phasensprünge können die Schichtdicken einer vorgegebenen Wellenlänge so angepasst werden, dass diese Wellenlänge dann fast vollständig transmittiert wird. Bei anderen Wellenlängen tritt dann eine geringere Transmission, und bei manchen Wellenlängen sogar gar keine Transmission mehr auf.
Zur Reduktion von Reflexionen an Grenzflächen werden bei optischen Systemen einzelne Linsen sehr häufig zu einer Einheit zusammengefasst, indem sie mit optischem Kitt verbunden werden (Verkittung).
Durch die Variation der Brechzahlen, der Schichtdicken und der Anzahl der Schichten stehen sehr viele Gestaltungsmöglichkeiten zur Verfügung, bei den die Reflexions- und Transmissionsgrade nicht mehr analytisch, sondern nur noch mit Simulationsberechnungen ermittelt werden können. Typische Anwendungsfelder sind die Oberflächenvergütung von Objektivlinsen zur Vermeidung von Reflexionen und insbesondere von Mehrfachreflexionen zwischen den Linsengruppen. Ferner können mit dünnen Schichten verschiedener Brechkraft Interferenzfilter hergestellt werden, die nur einen bestimmten und definierbaren Wellenlängenbereich passieren lassen.
Parallele Verschiebung
Bearbeiten
Um einen parallelen Versatz der optischen Achse um den Betrag zu erwirken, kann zum Beispiel eine um den Winkel zur optischen Achse geneigte planparallele Platte in den Strahlengang eingebracht werden.
Nach dem Snelliusschen Brechungsgesetz sind die Richtung des einfallenden Strahls und des ausfallenden Strahls parallel - die Winkel zwischen der optischen Achse und dem Lot der planparallelen Platte sind also vor und hinter der Platte identisch (siehe Abbildung rechts), wobei der Winkel die Winkel des Lichtstrahls zu den beiden Loten innerhalb der Platte beschreibt.In den folgenden Rechenbeispielen wird die Brechzahl außerhalb der planparallelen Platte mit der Brechzahl als eins angesetzt.

Die Länge ist eine Hilfsgröße zur Berechnung mit Hilfe der Anwendung des Sinussatzes. Wenn die Dicke der planparallelen Platte ist, ergibt sich:

Unter erneuter Verwendung des Sinussatzes gilt jedoch auch:


Aus der Gleichsetzung der beiden Formeln ergibt sich für den Versatz :

Die maximal erreichbare Ablenkung entspricht bei einer Neigung von 90° der Dicke der Platte:


Für kleine Neigungswinkel (im Bogenmaß) gilt die Näherung:

Auf der anderen Seite können durch planparallele Platten auch unerwünschte Aberrationen verursacht werden: wenn einfallende Lichtstrahlen aus unterschiedlichen Richtungen in einem bestimmten Punkt der planparallelen Platte eintreten, ergeben sich unterschiedliche Austrittsorte. Durch diese seitlichen Abweichungen kann es bei optischen Abbildungen zur Verschlechterung der Bildschärfe kommen. Beim Rechnen von Objektiven muss für höchste Ansprüche dieser Effekt berücksichtigt werden, wenn sich vor dem Bildsensor planparallele Platten wie zum Beispiel Infrarotfilter, optische Tiefpassfilter, Mikrolinsen- oder Farbfilterarrays befinden (siehe auch Abschnitt Infrarot-Sperrfilter und folgende).
Verkippung
Bearbeiten


Um eine Verkippung der optischen Achse um den Winkel zu erwirken, kann zum Beispiel ein Dreiecksprisma mit dem Prismenwinkel im Scheitel der Querschnittsfläche in den Strahlengang eingebracht werden.
Nach dem Snelliusschen Brechungsgesetz ergibt sich beim Einfall in das Prisma mit dem Einfallswinkel :

Mit dem Prismenwinkel ergibt sich geometrisch:

Nach dem Snelliusschen Brechungsgesetz ergibt sich beim Ausfall aus dem Prisma der Ausfallswinkel :


Der Ablenkwinkel ergibt sich dann wiederum rein geometrisch aus den oben bestimmten Winkeln:

Der minimale Ablenkwinkel ergibt sich, wenn Einfallswinkel und Ausfallswinkel identisch sind. Der Ablenkwinkel ergibt sich in diesem Fall wie folgt:


mit:

Demzufolge kann der Brechungsindex aus dem minimalen Ablenkwinkel bestimmt werden:

Die maximale Ablenkung des Lichtstrahls ergibt sich sowohl bei einem Einfallswinkel von 90° als auch bei einem Ausfallswinkel von 90°. Der maximale Ablenkwinkel beträgt dann:



Bei der Brechung kommt es zur Dispersion, also der wellenlängenabhängigen Varianz der Brechzahl. Dabei werden blaue Lichtstrahlen stärker gebrochen als rote, so dass es bei optischen Abbildungen zur chromatischen Aberration kommt (siehe auch Abschnitt Chromatische Aberration).
Atmosphärische Störungen
Bearbeiten
Durch die atmosphärische Refraktion tritt eine Winkelabweichung des scheinbaren Ortes eines abgebildeten Punkts von seiner tatsächlichen Lage, die im Vakuum beobachtet werden würde. Im Zenit verschwindet diese Abweichung, mit größer werdenden Zenitwinkeln nimmt sie aber stetig zu, und der scheinbare Ort ist am Horizont bei normalen atmosphärischen Bedingungen zirka 35 Bogenminuten höher als der wirkliche Ort. Der Winkelabstand zwischen zwei Punktobjekten mit unterschiedlicher Zenitdistanz wird demzufolge durch eine differentielle Refraktion verkleinert. Durch diesen Effekt erscheinen Sonne und Mond besonders im Horizontnähe in vertikaler Richtung verkürzt und somit nicht mehr kreisförmig, sondern in die Breite gezogen.
Eine weitere, wenn auch geringere, Winkelabweichung ist wellenlängenabhängig und wird auch atmosphärische Dispersion genannt. Die stärke Brechung des kurzwelligen blauen Lichtes führt dazu, dass kontrastreiche Kanten in Horizontnähe mit Farbsäumen abgebildet werden. An der Unterkante von weißlichen Objekten ergeben sich in atmosphärischen Aufnahmen deswegen gelbliche und rötliche Farben und an der Oberkante grünliche und blaue. Der blaue Lichtanteil wird jedoch meistens durch die Rayleigh-Streuung seitlich weggestreut, so dass er nicht zum Beobachtungspunkt gelangt. Dies erklärt den grünen Blitz, der bei günstigen Sichtverhältnissen bei Sonnenaufgang oder Sonnenuntergang an der Oberkante der Sonnenscheibe beobachtet werden kann. Auch bei Planetenscheiben sind solche Farbeffekte zu beobachten.

Bei optischen Abbildungen gibt es bei größer werdenden Objektweiten zunehmend starke atmosphärische Aberrationen. Der Bildkontrast wird durch Streuung in der Atmosphäre an Luftmolekülen, Staubpartikeln und Wassertröpfchen oder Eiskristallen verringert, weil insbesondere bei Tageslicht oder bei dem Vorhandensein von künstlichen Lichtquellen auch in dunklen Objektbereichen Streulicht aus den helleren Objektbereichen oder von Lichtquellen außerhalb des Bildfelds überlagert wird, so dass der Dunkelwert durch dieses Falschlicht deutlich erhöht sein kann.
Durch die Extinktion in der Atmosphäre gibt es zudem einen Lichtverlust, der genauso wie im Wasser und in anderen optischen Medien auch von der Wellenlänge des beobachteten Lichts abhängt und nicht nur durch die wellenlängenabhängige Streuung (siehe auch Streuung), sondern auch durch die wellenlängenabhängige Absorption verursacht wird. Sichtbares Licht, das aus dem Zenit die gesamte Atmosphäre durchläuft, wird um ungefähr zwanzig Prozent abgeschwächt. Hierbei kommt es auch zur Veränderung der beobachteten Verteilungen in den Lichtspektren, die einen Einfluss auf den Weißpunkt und den Weißabgleich von digitalen Bildern haben. Bei zunehmender Zenitdistanz wird der Weg durch die Atmosphäre immer länger, und somit nimmt auch die Abschwächung der Lichtstrahlen zu. Bei der Beobachtung eines Objektes außerhalb der Troposphäre, die ungefähr eine Höhe von 15 Kilometern hat, ist die Weglänge für die Lichtstrahlen durch die Troposphäre am Horizont (Zenitdistanz 90°) fast 50 mal größer als bei einem Objekt im Zenit (Zenitdistanz 0°).
Durch thermische Schwankungen in der Atmosphäre resultieren Dichteschwankungen und somit auch kleine Turbulenzen mit variierenden Brechungsindizes, die dafür verantwortlich sind, dass die beobachtete Helligkeit von quasi-punktförmigen Objekten zeitlich nicht konstant ist. Bei der Beobachtung - beispielsweise von Sternen - wird dieser durch die Luftunruhe hervorgerufene Effekt auch Szintillation genannt.
Die Periodendauer dieser atmosphärischen Schwankungen liegt typischerweise im Bereich von einigen Millisekunden. Bei Belichtungszeiten, die kürzer sind, ergibt sich eine Momentaufnahme mit örtlich variierenden Positionen, bei längeren Belichtungszeiten werden diese Schwankungen integriert, was zu einer Mittelung der registrierten Helligkeiten und somit zur Weichzeichnung von Objektkanten im Bild führt. Bei Objektiven oder Fernrohren, die nicht beugungsbegrenzt sind und nicht über eine aktiv korrigierende adaptive Optik verfügen, setzt die entsprechende Auflösungsbegrenzung bei terrestrischer Beobachtung ab bei einer Öffnungsweite von mehr als ungefähr 50 Millimetern ein, bei erdbasierten Teleskopen liegt die maximal sinnvolle Öffnungsweite bei 200 Millimetern. Teleskope in Satelliten und Raumschiffen arbeiten hingegen rein beugungsbegrenzt, da die Lichtstrahlen hierbei in der Regel nicht durch die Erdatmosphäre beeinflusst werden.
- Kugel des Berliner Fernsehturms (Durchmesser 32 Meter) aus fünf Kilometern Entfernung
-
 Originalaufnahme mit Blaustich, geringem Kontrast und ungleichmäßigen Objektkanten durch die Einflüsse der Atmosphäre (Belichtungszeit 2 ms)
Originalaufnahme mit Blaustich, geringem Kontrast und ungleichmäßigen Objektkanten durch die Einflüsse der Atmosphäre (Belichtungszeit 2 ms) -
 Atmosphärische Kontrastverluste und Farbstich wurden durch digitale Tonwertkorrekturen kompensiert
Atmosphärische Kontrastverluste und Farbstich wurden durch digitale Tonwertkorrekturen kompensiert -
 Simulation der Weichzeichnung bei einer längeren Belichtung durch atmosphärisches Flimmern
Simulation der Weichzeichnung bei einer längeren Belichtung durch atmosphärisches Flimmern



Vorwort | Grundlagen | Beleuchtung | Bildaufnahme | Lichtwandlung | Digitale Bilder | Wiedergabe | Transformationen | Literatur